В этой главе мы поймем основные свойства Z-преобразований.
линейность
В нем говорится, что когда два или более отдельных дискретных сигнала умножаются на константы, их соответствующие Z-преобразования также будут умножаться на одни и те же константы.
Математически,
a1x1(n)+a2x2(n)=a1X1(z)+a2X2(z)
Доказательство — Мы знаем это,
X(Z)= sum n=− inftyinftyx(n)Z−n
= sum n=− inftyinfty(a1x1(n)+a2x2(n))Z−n
=a1 sum n=− inftyinftyx1(n)Z−n+a2 sum n=− inftyinftyx2(n)Z−n
=a1X1(z)+a2X2(z) (доказано)
Здесь ROC — это ROC1 bigcapROC2.
Временной сдвиг
Свойство сдвига во времени показывает, как изменение во временной области в дискретном сигнале повлияет на Z-область, которая может быть записана как;
x(n−n0) longleftrightarrowX(Z)Z−n
Или x(n−1) longleftrightarrowZ−1X(Z)
Доказательство —
Пусть y(P)=X(PK)
Y(z)= sum p=− inftyinftyy(p)Z−p
= sum p=− inftyinfty(x(pk))Z−p
Пусть s = pk
= sum s=− inftyinftyx(s)Z−(s+k)
= sum s=− inftyinftyx(s)Z−sZ−k
=Z−k[ sum s=− inftyinftyx(m)Z−s]
=Z−kX(Z) (доказано)
Здесь ROC может быть записано как Z = 0 (p> 0) или Z = ∞ (p <0)
пример
U (n) и U (n-1) могут быть построены следующим образом
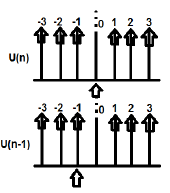
Z-преобразование U (n) может быть записано как;
sum n=− inftyinfty[U(n)]Z−n=1
Z-преобразование U (n-1) может быть записано как;
sum n=− inftyinfty[U(n−1)]Z−n=Z−1
Так что здесь x(n−n0)=Z−n0X(Z) (доказано)
Масштабирование времени
Свойство Time Scaling сообщает нам, какой будет Z-область сигнала, когда время масштабируется в его дискретной форме, которую можно записать как;
anx(n) longleftrightarrowX(a−1Z)
Доказательство —
Пусть y(p)=apx(p)
Y(P)= sum p=− inftyinftyy(p)Z−p
= sum p=− inftyinftyapx(p)Z−p
= sum p=− inftyinftyx(p)[a−1Z]−p
=X(a−1Z) (следовательно, доказано)
ROC: = Mod (ar1) <Mod (Z) <Mod (ar2), где Mod = Модуль
пример
Определим Z-преобразование x(n)=an cos omegan, используя свойство масштабирования по времени.
Решение —
Мы уже знаем, что Z-преобразование сигнала cos( omegan) определяется выражением —
sum n=− inftyinfty( cos omegan)Z−n=(Z2−Z cos omega)/(Z2−2Z cos omega+1)
Теперь, применяя свойство масштабирования по времени, Z-преобразование an cos omegan можно записать в виде;
sum n=− inftyinfty(an cos omegan)Z−n=X(a−1Z)
=[(a−1Z)2−(a−1Z cos omegan)]/((a−1Z)2−2(a−1Z cos omegan)+1)
=Z(Za cos omega)/(Z2−2az cos omega+a2)
Последовательная дифференциация
Свойство последовательного дифференцирования показывает, что Z-преобразование будет иметь место, когда мы дифференцируем дискретный сигнал во временной области по времени. Это показано ниже.
fracdx(n)dn=(1−Z−1)X(Z)
Доказательство —
Рассмотрим LHS уравнения — fracdx(n)dn
= frac[x(n)−x(n−1)][n−(n−1)]
=x(n)−X(n−1)
=x(Z)−Z−1x(Z)
=(1−Z−1)x(Z) (доказано)
ROC: R1 <Mod (Z) <R2
пример
Найдем Z-преобразование сигнала, заданного как x(n)=n2u(n)
По свойству мы можем написать
Zz[nU(n)]=−Z fracdZ[U(n)]dz
=−Z fracd[ fracZZ−1]dZ
=Z/((Z−1)2
=y(let)
Теперь Z [ny] можно узнать, снова применив свойство,
Z(n,y)=−Z fracdydz
=−Z fracd[Z/(Z−1)3]dz
=Z(Z+1)/(Z−1)2
свертка
Это показывает изменение в Z-области системы, когда происходит свертка в форме дискретного сигнала, которая может быть записана как —
x1(n)∗x2(n) longleftrightarrowX1(Z).X2(Z)
Доказательство —
X(Z)= sum n=− inftyinftyx(n)Z−n
= sum n=− inftyinfty[ sum k=− inftyinftyx1(k)x2(nk)]Z−n
= sum k=− inftyinftyx1(k)[ sum ninftyx2(nk)Z−n]
= sum k=− inftyinftyx1(k)[ sum n=− inftyinftyx2(nk)Z−(nk)Z−k]
Пусть nk = l, тогда приведенное выше уравнение можно записать в виде —
X(Z)= sum k=− inftyinftyx1(k)[Z−k sum l=− inftyinftyx2(l)Z−l]
= sum k=− inftyinftyx1(k)X2(Z)Z−k
=X2(Z) sum k=− inftyinftyx1(Z)Z−k
=X1(Z).X2(Z) (доказано)
ROC: ROC bigcapROC2
пример
Найдем свертку, заданную двумя сигналами
x1(n)= lbrace3,−2,2 rbrace … (уравнение 1)
x2(n)= lbrace2,0 leq4 quadи quad0 quadelsewhere rbrace … (уравнение 2)
Z-преобразование первого уравнения можно записать в виде;
sum n=− inftyinftyx1(n)Z−n
=3−2Z−1+2Z−2
Z-преобразование второго сигнала можно записать в виде;
sum n=− inftyinftyx2(n)Z−n
=2+2Z−1+2Z−2+2Z−3+2Z−4
Итак, свертка двух вышеупомянутых сигналов определяется как —
X(Z)=[x1(Z)∗x2(Z)]
=[3−2Z−1+2Z−2] times[2+2Z−1+2Z−2+2Z−3+2Z−4]
=6+2Z−1+6Z−2+6Z−3+... quad... quad...
Взяв обратное Z-преобразование, мы получим,
x(n)= lbrace6,2,6,6,6,0,4 rbrace
Теорема начального значения
Если x (n) является причинной последовательностью, которая имеет свое Z-преобразование как X (z), то теорема о начальном значении может быть записана как;
X(n)(at quadn=0)= limz to inftyX(z)
Доказательство — Мы знаем это,
X(Z)= sum n=0inftyx(n)Z−n
Расширяя вышеприведенные серии, получаем;
=X(0)Z0+X(1)Z−1+X(2)Z−2+... quad...
=X(0) times1+X(1)Z−1+X(2)Z−2+... quad...
В приведенном выше случае, если Z → ∞, то Z−n rightarrow0 (потому что n> 0)
Поэтому мы можем сказать;
limz to inftyX(z)=X(0) (доказано)
Окончательная Теорема Значения
Теорема об окончательном значении утверждает, что если Z-преобразование сигнала представлено в виде X (Z) и все полюсы находятся внутри круга, то его окончательное значение обозначается как x (n) или X (∞) и может быть записано как —
X( infty)= limn to inftyX(n)= limz to1[X(Z)(1−Z−1)]]
Условия —
- Это применимо только для причинных систем.
- В X(Z)(1−Z−1) должны быть полюсы внутри единичного круга в Z-плоскости.
Доказательство — мы знаем, что
Z+[x(n+1)−x(n)]= limk to infty sumkn=0Z−n[x(n+1)−x(п)]
RightarrowZ+[x(n+1)]−Z+[x(n)]= limk to infty sumkn=0Z−n[x(п+1)−x(п)]
RightarrowZ[X(Z)+−x(0)]−X(Z)+= limk to infty sumkn=0Z−n[x(п+1)−x(п)]
Здесь мы можем применить расширенное свойство одностороннего Z-преобразования. Таким образом, вышеприведенное уравнение может быть переписано как;
Z+[x(n+1)]=Z[X(2)+−x(0)Z0]=Z[X(Z)+−x(0)]
Теперь, положив z = 1 в приведенном выше уравнении, мы можем расширить приведенное выше уравнение —
limk to infty[x(1)−x(0)+x(6)−x(1)+x(3)−x(2)+... quad... четырехъядерных...+х(х+1)−x(к)]
Это может быть сформулировано как;
X( infty)= limn to inftyX(n)= limz to1[X(Z)(1−Z−1)]] (доказано)
пример
Найдем начальное и конечное значение x (n), сигнал которого определяется
X(Z)=2+3Z−1+4Z−2
Решение — Давайте сначала найдем начальное значение сигнала, применив теорему
x(0)= limz to inftyX(Z)
= limz to infty[2+3Z−1+4Z−2]
=2+( frac3 infty)+( frac4 infty)=2
Теперь давайте найдем окончательное значение сигнала, применяя теорему
x( infty)= limz to infty[(1−Z−1)X(Z)]
= limz to infty[(1−Z−1)(2+3Z−1+4Z−2)]
= limz to infty[2+Z−1+Z−2−4Z−3]
=2+1+1−4=0
Некоторые другие свойства Z-преобразования перечислены ниже —
Дифференциация по частоте
Это дает изменение в Z-области сигнала, когда его дискретный сигнал дифференцируется по времени.
nx(n) longleftrightarrow−Z fracdX(z)dz
Его РПЦ можно записать как;
r2<Mod(Z)<r1
пример
Найдем значение x (n) через дифференцирование по частоте, дискретный сигнал которого в Z-области задается как x(n) longleftrightarrowX(Z)=log(1+aZ−1)
По свойству мы можем написать, что
nx(n) longleftrightarrow−Z fracdx(Z)dz
=−Z[ frac−aZ−21+aZ−1]
=(aZ−1)/(1+aZ−1)
=1−1/(1+aZ−1)
nx(n)= delta(n)−(−a)nu(n)
Rightarrowx(n)=1/n[ delta(n)−(−a)nu(n)]
Умножение во времени
Это дает изменение в Z-области сигнала, когда умножение происходит на уровне дискретного сигнала.
x1(n).x2(n) longleftrightarrow( frac12 Pij)[X1(Z)∗X2(Z)]
Спряжение во времени
Это изображает представление сопряженного дискретного сигнала в Z-области.
X∗(n) longleftrightarrowX∗(Z∗)