Свертка двух сигналов во временной области эквивалентна умножению их представления в частотной области. Математически мы можем записать свертку двух сигналов как
y(t)=x1(t)∗x2(t) = int infty− inftyx1(p).x2(ф)дп
Шаги для свертки
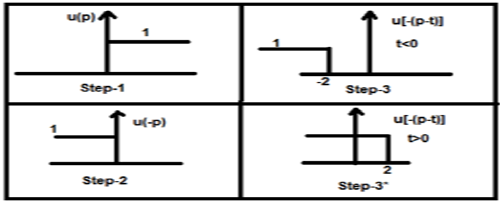
- Возьмите сигнал x 1 (t) и поместите туда t = p так, чтобы он был x 1 (p).
- Возьмите сигнал x 2 (t) и сделайте шаг 1 и сделайте его x 2 (p).
- Сделайте сворачивание сигнала, т.е. х 2 (-p).
- Выполните сдвиг во времени вышеуказанного сигнала x 2 [- (pt)]
- Затем сделайте умножение обоих сигналов. то есть x1(p).x2[−(p−t)]
пример
Сделаем свертку ступенчатого сигнала u (t) с его собственным видом.
y(t)=u(t)∗u(t)
= int infty− infty[u(p).u[−(pt)]dp
Теперь это t может быть больше или меньше нуля, что показано на рисунках ниже
Таким образом, в приведенном выше случае, результат возникает со следующими возможностями
y (t) = \ begin {case} 0, & if \ quad t <0 \\\ int_ {0} ^ {t} 1dt, & for \ quad t> 0 \ end {case}
= \ begin {case} 0, & если \ quad t <0 \\ t, & t> 0 \ end {case} = r (t)
Свойства свертки
Коммутативный
В нем говорится, что порядок свертки не имеет значения, что может быть математически показано как
x1(t)∗x2(t)=x2(t)∗x1(t)
ассоциативный
В нем говорится, что порядок свертки, включающий три сигнала, может быть любым. Математически это может быть показано как;
x1(t)∗[x2(t)∗x3(t)]=[x1(t)∗x2(t)]∗x3(т)
дистрибутивный
Сначала могут быть добавлены два сигнала, а затем их свертка может быть сделана с третьим сигналом. Это эквивалентно свертке двух сигналов по отдельности с третьим сигналом и добавлению окончательно. Математически это можно записать так:
x1(t)∗[x2(t)+x3(t)]=[x1(t)∗x2(t)+x1(т)∗X3(т)]
Площадь
Если сигнал является результатом свертки двух сигналов, то область сигнала — это умножение этих отдельных сигналов. Математически это можно записать
Если y(t)=x1∗x2(t)
Тогда, Площадь у (т) = Площадь х 1 (т) Х Площадь х 2 (т)
пересчет
Если два сигнала масштабируются до некоторой неизвестной постоянной «а» и свертка выполняется, то результирующий сигнал также будет свернут в одну и ту же постоянную «а» и будет разделен на эту величину, как показано ниже.
Если x1(t)∗x2(t)=y(t)
Тогда x1(at)∗x2(at)= fracy(at)a,a ne0
задержка
Предположим, что сигнал y (t) является результатом свертки двух сигналов x1 (t) и x2 (t). Если два сигнала задерживаются на время t1 и t2 соответственно, то результирующий сигнал y (t) будет задерживаться на (t1 + t2). Математически это можно записать как —
Если x1(t)∗x2(t)=y(t)
Тогда x1(t−t1)∗x2(t−t2)=y[t−(t1+t2)]
Решенные примеры
Пример 1 — Найти свертку сигналов u (t-1) и u (t-2).
Решение — Даны сигналы u (t-1) и u (t-2). Их свертка может быть сделана, как показано ниже —
y(t)=u(t−1)∗u(t−2)
y(t)= int+ infty− infty[u(t−1).u(t−2)]dt
=r(t−1)+r(t−2)
=r(t−3)
Пример 2 — Найти свертку двух сигналов, заданных
x1(n)= lbrace3,−2,2 rbrace
x_ {2} (n) = \ begin {case} 2, & 0 \ leq n \ leq 4 \\ 0, & x> elsewhere \ end {case}
Решение —
x 2 (n) может быть декодирован как x2(n)= lbrace2,2,2,2,2 rbraceOriginalfirst
x 1 (n) предварительно задано = lbrace3,−2,3 rbrace=3−2Z−1+2Z−2
Аналогично, x2(z)=2+2Z−1+2Z−2+2Z−3+2Z−4
Результирующий сигнал,
X(Z)=X1(Z)X2(z)
= lbrace3−2Z−1+2Z−2 rbrace times lbrace2+2Z−1+2Z−2+2Z−3+2Z−4 rbrace
=6+2Z−1+6Z−2+6Z−3+6Z−4+6Z−5
Принимая обратное Z-преобразование, мы получим результирующий сигнал как
x(n)= lbrace6,2,6,6,6,0,4 rbrace Происхождение на первом
Пример 3 — Определить свертку следующих 2 сигналов —
x(n)= lbrace2,1,0,1 rbrace
h(n)= lbrace1,2,3,1 rbrace
Решение —
Взяв Z-преобразование сигналов, получим,
x(z)=2+2Z−1+2Z−3
И h(n)=1+2Z−1+3Z−2+Z−3
Теперь свертка двух сигналов означает умножение их Z-преобразований.
То есть Y(Z)=X(Z) timesh(Z)
= lbrace2+2Z−1+2Z−3 rbrace times lbrace1+2Z−1+3Z−2+Z−3 rbrace
= lbrace2+5Z−1+8Z−2+6Z−3+3Z−4+3Z−5+Z−6 rbrace
Принимая обратное Z-преобразование, результирующий сигнал может быть записан как;
y(n)= lbrace2,5,8,6,6,1 rbraceOriginalfirst