Если вывод или некоторая часть вывода возвращаются на сторону ввода и используются как часть ввода системы, то это называется обратной связью . Обратная связь играет важную роль в повышении производительности систем управления. В этой главе давайте обсудим типы обратной связи и ее влияние.
Типы отзывов
Есть два типа обратной связи —
- Положительный отзыв
- Негативный отзыв
Положительный отзыв
Положительная обратная связь добавляет опорный вход, R(s) и вывод обратной связи. На следующем рисунке показана блок-схема системы управления положительной обратной связью .
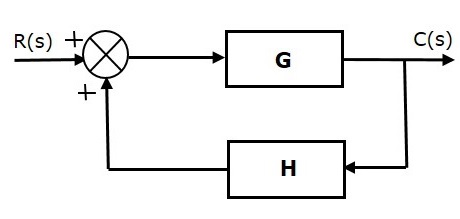
Концепция передаточной функции будет обсуждаться в следующих главах. В настоящее время рассмотрим передаточную функцию системы управления положительной обратной связью,
T= fracG1−GH (Уравнение 1)
Куда,
-
Т — передаточная функция или общее усиление системы управления положительной обратной связью.
-
G — коэффициент усиления без обратной связи, который является функцией частоты.
-
H — коэффициент усиления обратной связи, который является функцией частоты.
Т — передаточная функция или общее усиление системы управления положительной обратной связью.
G — коэффициент усиления без обратной связи, который является функцией частоты.
H — коэффициент усиления обратной связи, который является функцией частоты.
Негативный отзыв
Отрицательная обратная связь уменьшает ошибку между опорным входом, R(s) и выходом системы. На следующем рисунке показана блок-схема системы управления отрицательной обратной связью .
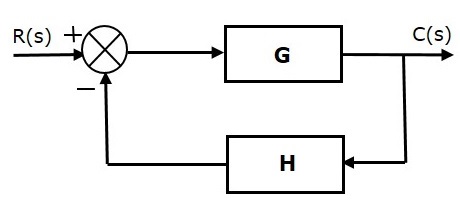
Передаточная функция системы управления отрицательной обратной связью,
T= fracG1+GH (уравнение 2)
Куда,
-
Т — передаточная функция или общий коэффициент усиления системы управления с отрицательной обратной связью.
-
G — коэффициент усиления без обратной связи, который является функцией частоты.
-
H — коэффициент усиления обратной связи, который является функцией частоты.
Т — передаточная функция или общий коэффициент усиления системы управления с отрицательной обратной связью.
G — коэффициент усиления без обратной связи, который является функцией частоты.
H — коэффициент усиления обратной связи, который является функцией частоты.
Вывод вышеупомянутой передаточной функции представлен в следующих главах.
Эффекты обратной связи
Давайте теперь поймем эффект обратной связи.
Влияние обратной связи на общий доход
-
Из уравнения 2 можно сказать, что общий выигрыш в системе управления с обратной связью с отрицательной обратной связью представляет собой отношение «G» и (1 + GH). Таким образом, общее усиление может увеличиваться или уменьшаться в зависимости от значения (1 + GH).
-
Если значение (1 + GH) меньше 1, общий коэффициент усиления увеличивается. В этом случае значение «GH» является отрицательным, поскольку усиление пути обратной связи является отрицательным.
-
Если значение (1 + GH) больше 1, то общее усиление уменьшается. В этом случае значение «GH» является положительным, поскольку усиление пути обратной связи является положительным.
Из уравнения 2 можно сказать, что общий выигрыш в системе управления с обратной связью с отрицательной обратной связью представляет собой отношение «G» и (1 + GH). Таким образом, общее усиление может увеличиваться или уменьшаться в зависимости от значения (1 + GH).
Если значение (1 + GH) меньше 1, общий коэффициент усиления увеличивается. В этом случае значение «GH» является отрицательным, поскольку усиление пути обратной связи является отрицательным.
Если значение (1 + GH) больше 1, то общее усиление уменьшается. В этом случае значение «GH» является положительным, поскольку усиление пути обратной связи является положительным.
В общем, «G» и «H» являются функциями частоты. Таким образом, обратная связь увеличит общее усиление системы в одном частотном диапазоне и уменьшит в другом частотном диапазоне.
Влияние обратной связи на чувствительность
Чувствительность общего усиления отрицательной обратной связи системы управления замкнутого контура ( T ) к изменению усиления разомкнутого контура ( G ) определяется как
STG= frac frac частичныйTT frac частичныйGG= fracПроцентизменитьвTPercentagechangeinG (уравнение 3)
Где, ∂T — инкрементное изменение T из-за инкрементного изменения G.
Мы можем переписать уравнение 3 как
STG= frac частичныйT частичныйG fracGT (уравнение 4)
Делаем частичное дифференцирование по G с обеих сторон уравнения 2.
frac частичныйT частичныйG= frac частный частичныйG left( fracG1+GH right)= frac(1+GH).1−G(H)(1+GH)2= frac1(1+GH)2 (уравнение 5)
Из уравнения 2 вы получите
fracGT=1+GH (Уравнение 6)
Замените уравнение 5 и уравнение 6 на уравнение 4.
SТG= гидроразрыва1(1+GH)2(1+GH)= гидроразрыва11+GH
Таким образом, мы получили чувствительность общего усиления системы управления с обратной связью как обратную величину (1 + GH). Таким образом, чувствительность может увеличиваться или уменьшаться в зависимости от значения (1 + GH).
-
Если значение (1 + GH) меньше 1, чувствительность увеличивается. В этом случае значение «GH» является отрицательным, поскольку усиление канала обратной связи является отрицательным.
-
Если значение (1 + GH) больше 1, чувствительность уменьшается. В этом случае значение «GH» является положительным, поскольку усиление пути обратной связи является положительным.
Если значение (1 + GH) меньше 1, чувствительность увеличивается. В этом случае значение «GH» является отрицательным, поскольку усиление канала обратной связи является отрицательным.
Если значение (1 + GH) больше 1, чувствительность уменьшается. В этом случае значение «GH» является положительным, поскольку усиление пути обратной связи является положительным.
В общем, «G» и «H» являются функциями частоты. Таким образом, обратная связь увеличит чувствительность усиления системы в одном диапазоне частот и уменьшит в другом диапазоне частот. Поэтому мы должны выбирать значения «GH» таким образом, чтобы система была нечувствительной или менее чувствительной к изменениям параметров.
Влияние обратной связи на стабильность
-
Система называется стабильной, если ее выход находится под контролем. В противном случае он называется нестабильным.
-
В уравнении 2, если значение знаменателя равно нулю (т. Е. GH = -1), выходной сигнал системы управления будет бесконечным. Итак, система управления становится нестабильной.
Система называется стабильной, если ее выход находится под контролем. В противном случае он называется нестабильным.
В уравнении 2, если значение знаменателя равно нулю (т. Е. GH = -1), выходной сигнал системы управления будет бесконечным. Итак, система управления становится нестабильной.
Поэтому мы должны правильно выбрать обратную связь, чтобы сделать систему управления стабильной.
Влияние обратной связи на шум
Чтобы узнать влияние обратной связи на шум, давайте сравним отношения передаточной функции с обратной связью и без нее из-за одного только шумового сигнала.
Рассмотрим систему управления без обратной связи с шумовым сигналом, как показано ниже.
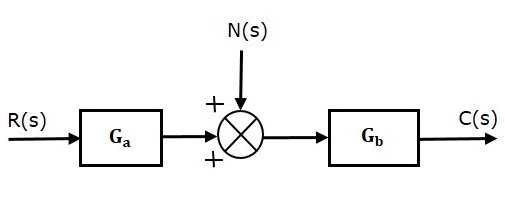
Передаточная функция разомкнутого контура из-за одного только шумового сигнала
fracC(s)N(s)=Gb (уравнение 7)
Это получается, делая другой вход R(s) равным нулю.
Рассмотрим систему управления с замкнутым контуром с шумовым сигналом, как показано ниже.
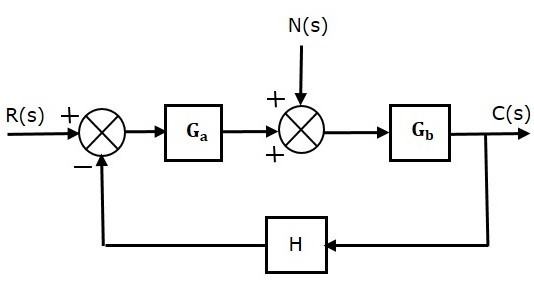
Передаточная функция замкнутого контура из-за одного только шумового сигнала
fracC(s)N(s)= fracGb1+GaGbH (уравнение 8)
Это получается, делая другой вход R(s) равным нулю.
Сравните уравнение 7 и уравнение 8,
В системе управления с обратной связью усиление, вызванное шумовым сигналом, уменьшается на коэффициент (1+GaGbH) при условии, что член (1+GaGbH) больше единицы.