Алгебра блок-схем — это не что иное, как алгебра, связанная с основными элементами блок-диаграммы. Эта алгебра имеет дело с графическим представлением алгебраических уравнений.
Основные соединения для блоков
Существует три основных типа соединений между двумя блоками.
Последовательное соединение
Последовательное соединение также называется каскадным соединением . На следующем рисунке два блока, имеющие передаточные функции G1(s) и G2(s), соединены последовательно.

Для этой комбинации мы получим вывод Y(s) как
Y(s)=G2(ы)Z(S)
Где Z(s)=G1(s)X(s)
RightarrowY(s)=G2(s)[G1(s)X(s)]=G1(s)G2(s)X(s)
RightarrowY(s)= lbraceG1(s)G2(s) rbraceX(s)
Сравните это уравнение со стандартной формой выходного уравнения, Y(s)=G(s)X(s). Где G(s)=G1(s)G2(s).
Это означает, что мы можем представить последовательное соединение двух блоков одним блоком. Передаточная функция этого единственного блока является произведением передаточных функций этих двух блоков. Эквивалентная блок-схема показана ниже.

Точно так же вы можете представить последовательное соединение n блоков с одним блоком. Передаточная функция этого единственного блока является произведением передаточных функций всех этих «n» блоков.
Параллельное соединение
Блоки, которые соединены параллельно, будут иметь одинаковый вход . На следующем рисунке два блока, имеющие передаточные функции G1(s) и G2(s), соединены параллельно. Выходы этих двух блоков подключены к точке суммирования.
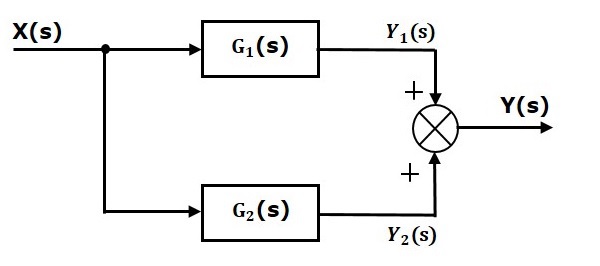
Для этой комбинации мы получим вывод Y(s) как
Y(s)=Y1(тв)+Y2(ы)
Где Y1(s)=G1(s)X(s) и Y2(s)=G2(s)X(s)
RightarrowY(s)=G1(s)X(s)+G2(s)X(s)= lbraceG1(s)+G2(s) rbraceX(s)
Сравните это уравнение со стандартной формой выходного уравнения, Y(s)=G(s)X(s).
Где G(s)=G1(s)+G2(s).
Это означает, что мы можем представить параллельное соединение двух блоков с одним блоком. Передаточная функция этого единственного блока является суммой передаточных функций этих двух блоков. Эквивалентная блок-схема показана ниже.

Точно так же вы можете представить параллельное соединение n блоков с одним блоком. Передаточная функция этого единственного блока является алгебраической суммой передаточных функций всех этих «n» блоков.
Обратная связь
Как мы уже говорили в предыдущих главах, существует два типа обратной связи — положительная и отрицательная. На следующем рисунке показана система контроля отрицательной обратной связи. Здесь два блока с передаточными функциями G(s) и H(s) образуют замкнутый цикл.
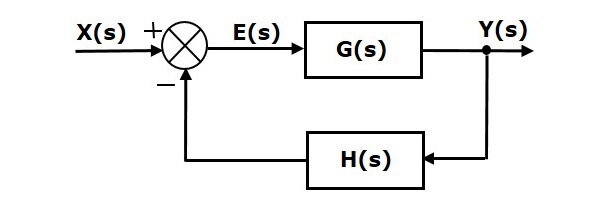
Выход точки суммирования —
E(S)=X(S)−H(ы)Y(ы)
Выход Y(s) —
Y(s)=Е(ы)О(ы)
Замените значение E(s) в приведенном выше уравнении.
Y (s) = \ left \ {X (s) -H (s) Y (s) \ rbrace G (s) \ right \}
Y (s) \ left \ {1 + G (s) H (s) \ rbrace = X (s) G (s) \ right \}
Rightarrow fracY(s)X(s)= fracG(s)1+G(s)H(s)
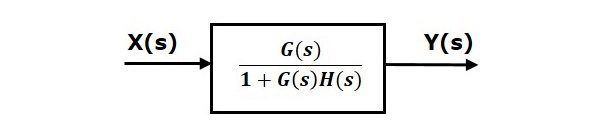
Следовательно, передаточная функция замкнутого контура с отрицательной обратной связью равна fracG(s)1+G(s)H(s)
Это означает, что мы можем представить соединение отрицательной обратной связи двух блоков с одним блоком. Передаточная функция этого одиночного блока является передаточной функцией обратной связи с обратной связью. Эквивалентная блок-схема показана ниже.
Точно так же вы можете представить соединение положительного отклика двух блоков с одним блоком. Передаточная функция этого единственного блока является передаточной функцией замкнутого контура положительной обратной связи, т. Е. FracG(s)1−G(s)H(s)
Блок-схема алгебры суммирования баллов
Есть две возможности смещения точек суммирования относительно блоков —
- Смещение точки суммирования после блока
- Смещение точки суммирования перед блоком
Давайте теперь посмотрим, какие меры необходимо предпринять в вышеупомянутых двух случаях один за другим.
Смещение точки суммирования после блока
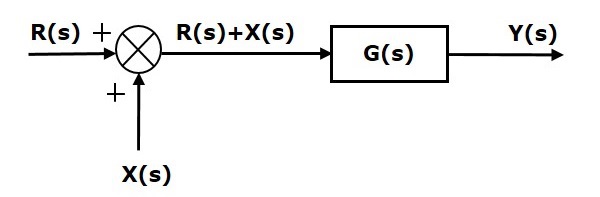
Рассмотрим блок-схему, показанную на следующем рисунке. Здесь точка суммирования присутствует перед блоком.
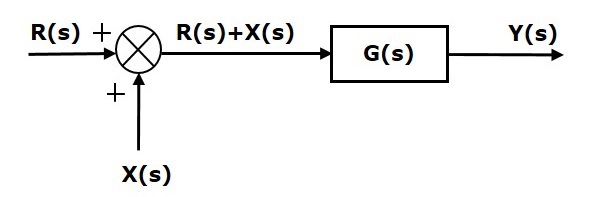
Точка суммирования имеет два входа R(s) и X(s). Выходные данные: \ left \ {R (s) + X (s) \ right \}.
Таким образом, вход в блок G(s) равен \ left \ {R (s) + X (s) \ right \}, а его выход —
Y (s) = G (s) \ left \ {R (s) + X (s) \ right \}
RightarrowY(s)=G(s)R(s)+G(s)X(s) (Уравнение 1)
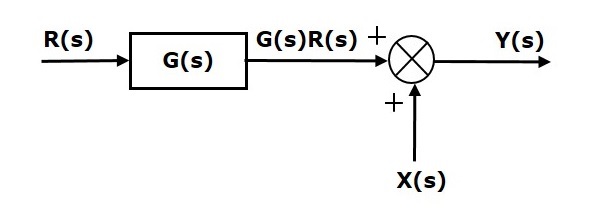
Теперь сдвиньте точку суммирования после блока. Эта блок-схема показана на следующем рисунке.
Выход блока G(s) равен G(s)R(s).
Выход точки суммирования
Y(s)=G(s)R(s)+X(s) (уравнение 2)
Сравните уравнение 1 и уравнение 2.
Первое слагаемое ′G(s)R(s)′ одинаково в обоих уравнениях. Но есть разница во втором семестре. Чтобы получить второй член, такой же, нам нужен еще один блок G(s). Он имеет входные данные X(s), а выходные данные этого блока задаются в качестве входных данных для точки суммирования вместо X(s). Эта блок-схема показана на следующем рисунке.
Смещение точки суммирования перед блоком
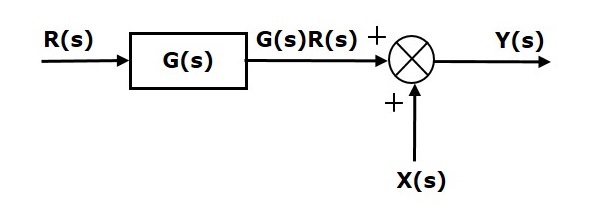
Рассмотрим блок-схему, показанную на следующем рисунке. Здесь точка суммирования присутствует после блока.
Выход этой блок-схемы —
Y(s)=G(s)R(s)+X(s) (уравнение 3)
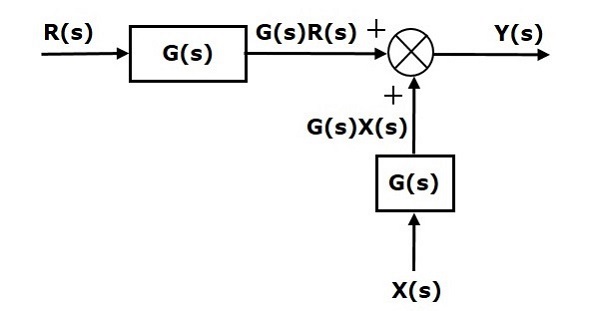
Теперь сдвиньте точку суммирования перед блоком. Эта блок-схема показана на следующем рисунке.
Выход этой блок-схемы —
Y(S)=G(s)R(s)+G(s)X(s) (Уравнение 4)
Сравните уравнение 3 и уравнение 4,
Первое слагаемое ′G(s)R(s)′ одинаково в обоих уравнениях. Но есть разница во втором семестре. Чтобы получить второй член, такой же, нам нужен еще один блок frac1G(s). Он имеет входные данные X(s), а выходные данные этого блока задаются в качестве входных данных для точки суммирования вместо X(s). Эта блок-схема показана на следующем рисунке.
Алгебра блок-схем для точек взлета
Есть две возможности сдвига точек взлета относительно блоков —
- Сдвиг точки взлета после блока
- Сдвиг точки взлета перед блоком
Давайте теперь посмотрим, какие меры должны быть предприняты в вышеупомянутых двух случаях, один за другим.
Сдвиг точки взлета после блока
Рассмотрим блок-схему, показанную на следующем рисунке. В этом случае точка взлета присутствует перед блоком.
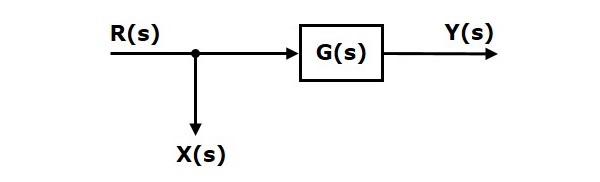
Здесь X(s)=R(s) и Y(s)=G(s)R(s)
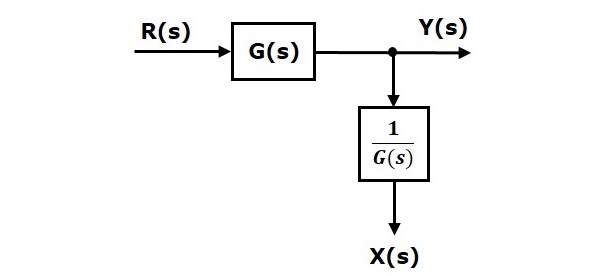
Когда вы сдвигаете точку взлета после блока, выходные данные Y(s) будут такими же. Но есть разница в значении X(s). Итак, чтобы получить то же значение X(s), нам потребуется еще один блок frac1G(s). Он имеет вход Y(s), а вывод — X(s). Эта блок-схема показана на следующем рисунке.
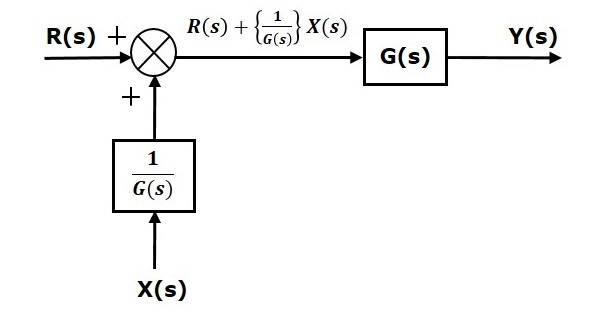
Сдвиг точки взлета перед блоком
Рассмотрим блок-схему, показанную на следующем рисунке. Здесь точка взлета присутствует после блока.
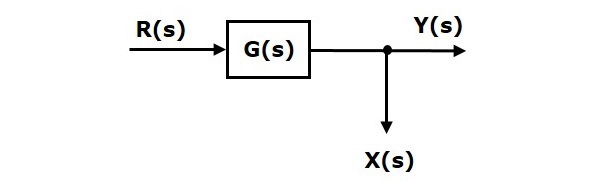
Здесь X(s)=Y(s)=G(s)R(s)
Когда вы сдвигаете точку взлета перед блоком, выходные данные Y(s) будут такими же. Но есть разница в значении X(s). Итак, чтобы получить то же значение X(s), нам потребуется еще один блок G(s). Он имеет вход R(s), а вывод — X(s). Эта блок-схема показана на следующем рисунке.