Модель пространства состояний системы линейного инварианта времени (LTI) может быть представлена как
точкаX=AX+BU
Y=CX+DU
Первое и второе уравнения известны как уравнение состояния и выходное уравнение соответственно.
Куда,
-
X и dotX — вектор состояния и вектор дифференциального состояния соответственно.
-
U и Y — входной вектор и выходной вектор соответственно.
-
А — системная матрица.
-
B и C — входная и выходная матрицы.
-
D — матрица прямой связи.
X и dotX — вектор состояния и вектор дифференциального состояния соответственно.
U и Y — входной вектор и выходной вектор соответственно.
А — системная матрица.
B и C — входная и выходная матрицы.
D — матрица прямой связи.
Основные понятия государственной космической модели
Следующая основная терминология используется в этой главе.
государственный
Это группа переменных, которая суммирует историю системы, чтобы предсказать будущие значения (результаты).
Государственная переменная
Количество требуемых переменных состояния равно количеству элементов хранения, присутствующих в системе.
Примеры — ток, протекающий через индуктор, напряжение на конденсаторе
Государственный вектор
Это вектор, который содержит переменные состояния в качестве элементов.
В предыдущих главах мы обсудили две математические модели систем управления. Это модель дифференциального уравнения и модель передаточной функции. Модель пространства состояний может быть получена из любой из этих двух математических моделей. Давайте теперь обсудим эти два метода один за другим.
Модель пространства состояний из дифференциального уравнения
Рассмотрим следующую серию схемы RLC. Он имеет входное напряжение, vi(t), а ток, протекающий по цепи, составляет i(t).
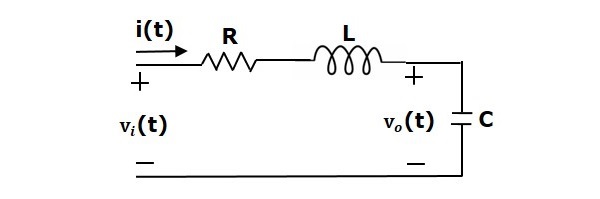
В этой схеме есть два накопителя (индуктор и конденсатор). Таким образом, число переменных состояния равно двум, и этими переменными состояния являются ток, протекающий через индуктор, i(t) и напряжение на конденсаторе, vc(t).
Из схемы выходное напряжение v0(t) равно напряжению на конденсаторе, vc(t).
v0(т)=vc(т)
Примените КВЛ вокруг петли.
vi(т)=Ri(т)+L гидроразрыва текстdя(т) текстdт+vc(т)
Rightarrow frac textdi(t) textdt=− fracRi(t)L− fracvc(t)L+ гидроразрываvi(т)L
Напряжение на конденсаторе составляет —
vc(t)= frac1C inti(t)dt
Дифференцируйте вышеприведенное уравнение по времени.
гидроразрыва текстdvc(т) текстdт= гидроразрывая(т)C,
Вектор состояния, X= beginbmatrixi(t)vc(t) endbmatrix
Вектор дифференциального состояния, dotX= beginbmatrix frac textdi(t) textdt frac textdvc(t) textdt endbmatrix
Мы можем организовать дифференциальные уравнения и выходное уравнение в стандартную форму модели пространства состояний как,
\ dot {X} = \ begin {bmatrix} \ frac {\ text {d} i (t)} {\ text {d} t} \\\ frac {\ text {d} v_c (t)} { \ text {d} t} \ end {bmatrix} = \ begin {bmatrix} — \ frac {R} {L} & — \ frac {1} {L} \\\ frac {1} {C} & 0 \ end {bmatrix} \ begin {bmatrix} i (t) \\ v_c (t) \ end {bmatrix} + \ begin {bmatrix} \ frac {1} {L} \\ 0 \ end {bmatrix} \ begin {bmatrix } v_i (t) \ end {bmatrix}
Y = \ begin {bmatrix} 0 & 1 \ end {bmatrix} \ begin {bmatrix} i (t) \\ v_c (t) \ end {bmatrix}
Куда,
A = \ begin {bmatrix} — \ frac {R} {L} & — \ frac {1} {L} \\\ frac {1} {C} & 0 \ end {bmatrix}, \: B = \ begin {bmatrix} \ frac {1} {L} \\ 0 \ end {bmatrix}, \: C = \ begin {bmatrix} 0 & 1 \ end {bmatrix} \: и \: D = \ begin {bmatrix } 0 \ end {bmatrix}
Модель пространства состояний из передаточной функции
Рассмотрим два типа передаточных функций, основанные на типе терминов, присутствующих в числителе.
- Передаточная функция с постоянным членом в Числителе.
- Передаточная функция, имеющая полиномиальную функцию ‘s’ в Числителе.
Передаточная функция с постоянным членом в Числителе
Рассмотрим следующую передаточную функцию системы
$$ \ гидроразрыва {Y (s)} {U (s)} = \ {гидроразрыва b_0} {s ^ п + a_ {п-1} s ^ {п-1} + … + a_1s + A_0} $ $
Переставить приведенное выше уравнение как
(sn+an−1sn−1+...+a0)Y(s)=b0U(s)
Примените обратное преобразование Лапласа с обеих сторон.
гидроразрыва текстdпу(т) текстdтп+ап−1 гидроразрыва текстdN−1у(т) текстdтN−1+...a1 гидроразрыва текстdу(г) текстdт+a0y(т)=B0и(т)
Позволять
у(г)=x1
гидроразрыва текстdу(г) текстdт=x2= точках−1
гидроразрыва текстd2у(т) текстdт2=x3= точках2
.
.
.
$$ \ гидроразрыва {\ текст {d} ^ {N-1} у (г)} {\ текст {d} т ^ {N-1}} = x_n = \ точки {х} _ {п-1} $ $
гидроразрыва текстdпу(т) текстdтп= точкахn
и u(t)=u
Затем,
dotxn+an−1xn+...+a1x2+a0x1=b0u
Из приведенного выше уравнения мы можем написать следующее уравнение состояния.
dotxn=−a0x1−a1x2−...−an−1xn+b0u
Выходное уравнение —
у(г)=у=x1
Модель пространства состояний —
dotX= beginbmatrix dotx1 dotx2 vdots dotxn−1 dotxn endbmatrix
= \ begin {bmatrix} 0 & 1 & 0 & \ dotso & 0 & 0 \\ 0 & 0 & 1 & \ dotso & 0 & 0 \\\ vdots & \ vdots & \ vdots & \ dotso & \ vdots & \ vdots \\ 0 & 0 & 0 & \ dotso & 0 & 1 \\ — a_0 & -a_1 & -a_2 & \ dotso & -a_ {n-2} & -a_ {n-1} \ end {bmatrix } \ begin {bmatrix} x_1 \\ x_2 \\\ vdots \\ x_ {n-1} \\ x_n \ end {bmatrix} + \ begin {bmatrix} 0 \\ 0 \\\ vdots \\ 0 \\ b_0 \ end {bmatrix} \ begin {bmatrix} u \ end {bmatrix}
Y = \ begin {bmatrix} 1 & 0 & \ dotso & 0 & 0 \ end {bmatrix} \ begin {bmatrix} x_1 \\ x_2 \\\ vdots \\ x_ {n-1} \\ x_n \ end {bmatrix}
Здесь D= left[0 right].
пример
Найти модель пространства состояний для системы, имеющей передаточную функцию.
гидроразрываY(ы)U(ы)= гидроразрыва1S2+S+1
Переставить, приведенное выше уравнение как,
(S2+S+1)Y(s)=U(ы)
Примените обратное преобразование Лапласа с обеих сторон.
гидроразрыва текстd2у(т) текстdт2+ гидроразрыва текстdу(г) текстdт+у(т)=U(T)
Позволять
у(г)=x1
гидроразрыва текстdу(г) текстdт=x2= точках−1
и u(t)=u
Тогда уравнение состояния
точках2=−x1−x2+и
Выходное уравнение
у(г)=у=x1
Модель пространства состояний
\ dot {X} = \ begin {bmatrix} \ dot {x} _1 \\\ dot {x} _2 \ end {bmatrix} = \ begin {bmatrix} 0 & 1 \\ — 1 & -1 \ end {bmatrix} \ begin {bmatrix} x_1 \\ x_2 \ end {bmatrix} + \ begin {bmatrix} 0 \\ 1 \ end {bmatrix} \ left [u \ right]
Y = \ begin {bmatrix} 1 & 0 \ end {bmatrix} \ begin {bmatrix} x_1 \\ x_2 \ end {bmatrix}
Передаточная функция, имеющая полиномиальную функцию ‘s’ в Числителе
Рассмотрим следующую передаточную функцию системы
fracY(s)U(s)= fracbnsn+bn−1sn−1+...+b1s+b0sn+an−1sn−1+...+a1s+a0
Rightarrow fracY(s)U(s)= left( frac1sn+an−1sn−1+...+a1s+a0 right)(bnsn+bn−1sn−1+...+b1s+b0)
Вышеупомянутое уравнение имеет вид произведения передаточных функций двух блоков, которые расположены каскадом.
fracY(s)U(s)= left( fracV(s)U(s) right) left( fracY(s)V(s) right)
Вот,
fracV(s)U(s)= frac1sn+an−1sn−1+...+a1s+a0
Переставить приведенное выше уравнение как
(ып+ап−1сN−1+...A0)V(S)=U(ы)
Примените обратное преобразование Лапласа с обеих сторон.
гидроразрыва текстdпу(т) текстdтп+ап−1 гидроразрыва текстdN−1v(т) textdtn−1+...+a1 frac textdv(t) textdt+a0v(t)=u(т)
Позволять
V(T)=x1
гидроразрыва текстdv((т) текстdт=x2= точках−1
гидроразрыва текстd2v(т) текстdт2=x3= точких2
.
.
.
$$ \ гидроразрыва {\ текст {d} ^ {N-1} V (T)} {\ текст {d} т ^ {N-1}} = x_n = \ точка {х} _ {п-1} $ $
гидроразрыва текстdпу(т) текстdтп= точкахn
и u(t)=u
Тогда уравнение состояния
точкахn=−a0x1−a1x2−...−ап−1xn+U
Рассматривать,
гидроразрываY(s)V(S)=bnsп+Bп−1сN−1+...+b1sB0
Переставить приведенное выше уравнение как
Y(s)=(bnsп+Bп−1сN−1+...+b1sB0)V(S)
Примените обратное преобразование Лапласа с обеих сторон.
у(г)=bn гидроразрыва текстdпу(т) текстdтп+Bп−1 гидроразрыва текстdп−1V(T) текстdтN−1+...b1 гидроразрыва текстdv(т) текстdт+b0v(т)
Подставляя переменные состояния и y(t)=y в вышеприведенном уравнении, получим выходное уравнение как,
у=bn точкахn+bп−1xn+...+b1x2+b0x1
Замените значение dotxn в приведенном выше уравнении.
у=bn(−a0x1−a1x2−...−ап−1xn+и)+Bп−1xn+...+b1x2b0x1
y=(b0−bna0)x1+(b1−bna1)x2+...+(bn−1−bnan−1)xn+bnu
Модель пространства состояний
dotX= beginbmatrix dotx1 dotx2 vdots dotxn−1 dotxn endbmatrix
= \ begin {bmatrix} 0 & 1 & 0 & \ dotso & 0 & 0 \\ 0 & 0 & 1 & \ dotso & 0 & 0 \\\ vdots & \ vdots & \ vdots & \ dotso & \ vdots & \ vdots \\ 0 & 0 & 0 & \ dotso & 0 & 1 \\ — a_0 & -a_1 & -a_2 & \ dotso & -a_ {n-2} & -a_ {n-1} \ end {bmatrix } \ begin {bmatrix} x_1 \\ x_2 \\\ vdots \\ x_ {n-1} \\ x_n \ end {bmatrix} + \ begin {bmatrix} 0 \\ 0 \\\ vdots \\ 0 \\ b_0 \ end {bmatrix} \ begin {bmatrix} u \ end {bmatrix}
Y=[b0−bna0 quadb1−bna1 quad... quadbn−2−bnan−2 quadbn−1−bnan−1] beginbmatrixx1x2 vdotsxn−1xn endbmatrix
Если bn=0, то
Y=[b0 quadb1 quad... quadbn−2 quadbn−1] beginbmatrixx1x2 vdotsxn−1xn endbmatrix