В этой главе мы обсудим моделирование дифференциальных уравнений механических систем. Существует два типа механических систем, основанных на типе движения.
- Трансляционные механические системы
- Ротационные механические системы
Моделирование трансляционных механических систем
Поступательные механические системы движутся по прямой . Эти системы в основном состоят из трех основных элементов. Это масса, пружина и приборная панель или демпфер.
Если сила прикладывается к поступательной механической системе, то ей противостоят противоположные силы из-за массы, упругости и трения системы. Поскольку приложенная сила и противоположные силы находятся в противоположных направлениях, алгебраическая сумма сил, действующих на систему, равна нулю. Давайте теперь посмотрим на силу, которой противостоят эти три элемента в отдельности.
масса
Масса — это свойство тела, которое хранит кинетическую энергию . Если сила применяется к телу, имеющему массу М , то ей противостоит сила противодействия, обусловленная массой. Эта противодействующая сила пропорциональна ускорению тела. Предположим, что эластичность и трение незначительны.
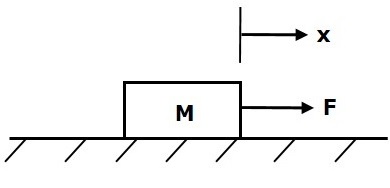
Fm proptoa
RightarrowFm=Ma=M frac textd2x textdt2
F=fm=М гидроразрыватекстD2x текстdт2
Куда,
-
F — приложенная сила
-
F m — противодействующая сила, обусловленная массой
-
М это масса
-
а ускорение
-
х смещение
F — приложенная сила
F m — противодействующая сила, обусловленная массой
М это масса
а ускорение
х смещение
весна
Весна — это элемент, который накапливает потенциальную энергию . Если сила приложена к пружине K , то ей противостоит сила противодействия из-за упругости пружины. Эта противодействующая сила пропорциональна смещению пружины. Предположим, что масса и трение незначительны.
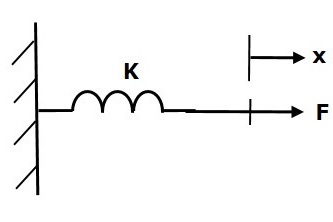
F proptox
RightarrowFk=Kx
F=Fk=Kx
Куда,
-
F — приложенная сила
-
F k — противодействующая сила из-за упругости пружины
-
К — пружинная постоянная
-
х смещение
F — приложенная сила
F k — противодействующая сила из-за упругости пружины
К — пружинная постоянная
х смещение
демпфер
Если сила приложена к передней панели B , то ей противостоит противоположная сила из-за трения передней панели. Эта противодействующая сила пропорциональна скорости тела. Предположим, что масса и эластичность незначительны.
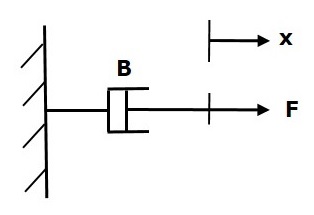
Fb propto nu
RightarrowFb=B nu=B frac textdx textdt
F=Fb=В гидроразрыва текстdх текстDт
Куда,
-
F b — противодействующая сила из-за трения приборной панели
-
B — коэффициент трения
-
v скорость
-
х смещение
F b — противодействующая сила из-за трения приборной панели
B — коэффициент трения
v скорость
х смещение
Моделирование вращательных механических систем
Вращательные механические системы движутся вокруг неподвижной оси. Эти системы в основном состоят из трех основных элементов. Это момент инерции, пружина кручения и приборная панель .
Если крутящий момент приложен к вращательной механической системе, то ему противостоят противоположные крутящие моменты из-за момента инерции, упругости и трения системы. Поскольку приложенный крутящий момент и противоположные крутящие моменты находятся в противоположных направлениях, алгебраическая сумма крутящих моментов, действующих на систему, равна нулю. Давайте теперь посмотрим крутящий момент, противостоящий этим трем элементам в отдельности.
Момент инерции
В поступательной механической системе масса накапливает кинетическую энергию. Аналогично, во вращательной механической системе момент инерции накапливает кинетическую энергию .
Если крутящий момент прикладывается к телу, имеющему момент инерции J , то ему противостоит противоположный крутящий момент, обусловленный моментом инерции. Этот противоположный крутящий момент пропорционален угловому ускорению тела. Предположим, что эластичность и трение незначительны.
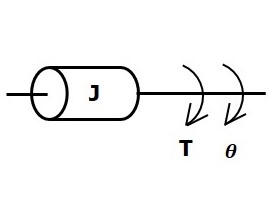
Tj propto alpha
RightarrowTj=J alpha=J frac textd2 theta textdt2
Т=Tj=J гидроразрыва текстd2 тета текстdт2
Куда,
-
T — приложенный крутящий момент
-
T j — противодействующий момент из-за момента инерции
-
J — момент инерции
-
α — угловое ускорение
-
θ — угловое смещение
T — приложенный крутящий момент
T j — противодействующий момент из-за момента инерции
J — момент инерции
α — угловое ускорение
θ — угловое смещение
Пружина кручения
В поступательной механической системе пружина накапливает потенциальную энергию. Аналогично, во вращательной механической системе торсионная пружина накапливает потенциальную энергию .
Если крутящий момент приложен к крутильной пружине K , то ему противостоит противоположный крутящий момент из-за упругости крутильной пружины. Этот противоположный крутящий момент пропорционален угловому смещению пружины кручения. Предположим, что момент инерции и трения ничтожен.
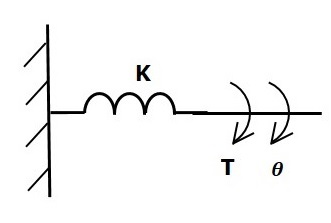
Tk propto theta
RightarrowTk=K theta
T=Tk=K Theta
Куда,
-
T — приложенный крутящий момент
-
T k — противодействующий момент из-за упругости пружины кручения
-
K — постоянная пружины кручения
-
θ — угловое смещение
T — приложенный крутящий момент
T k — противодействующий момент из-за упругости пружины кручения
K — постоянная пружины кручения
θ — угловое смещение
демпфер
Если крутящий момент приложен к передней панели B , то ему противостоит противоположный крутящий момент из-за вращательного трения передней панели. Этот противоположный крутящий момент пропорционален угловой скорости тела. Предположим, что момент инерции и упругости незначительны.
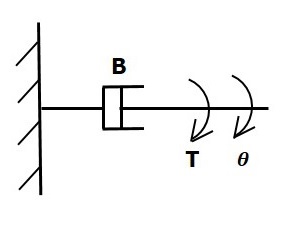
Tb propto omega
RightarrowTb=B omega=B frac textd theta textdt
Т=TB=В гидроразрыва текстd тета текстdт
Куда,
T b — противодействующий крутящий момент из-за вращательного трения передней панели
B — коэффициент вращательного трения
ω — угловая скорость
θ — угловое смещение