Различные типы контроллеров используются для повышения производительности систем управления. В этой главе мы обсудим основные контроллеры, такие как пропорциональный, производный и интегральный контроллеры.
Пропорциональный контроллер
Пропорциональный контроллер выдает выходной сигнал, который пропорционален сигналу ошибки.
u(t) proptoe(t)
Rightarrowu(t)=KPe(t)
Применить преобразование Лапласа с обеих сторон —
U(s)=KPE(s)
гидроразрываU(s)Е(с)=KP
Следовательно, передаточная функция пропорционального регулятора равна KP.
Куда,
U (s) — преобразование Лапласа управляющего сигнала u (t)
E (s) — преобразование Лапласа сигнала ошибки e (t)
K P — константа пропорциональности
Блок-схема системы управления замкнутым контуром с отрицательной обратной связью вместе с пропорциональным регулятором показана на следующем рисунке.
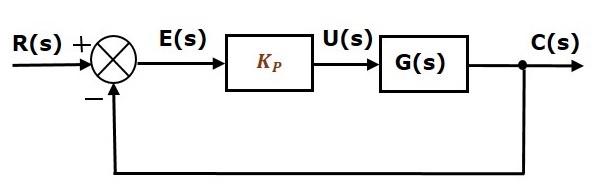
Пропорциональный регулятор используется для изменения переходного процесса в соответствии с требованием.
Производный контроллер
Производный контроллер выдает выход, который является производным от сигнала ошибки.
u(t)=KD frac textde(t) textdt
Примените преобразование Лапласа с обеих сторон.
U(s)=KDsE(s)
fracU(s)E(s)=KDs
Следовательно, передаточная функция производного контроллера равна KDs.
Где KD — производная константа.
Блок-схема единой системы управления с обратной связью и обратной связью вместе с производным контроллером показана на следующем рисунке.
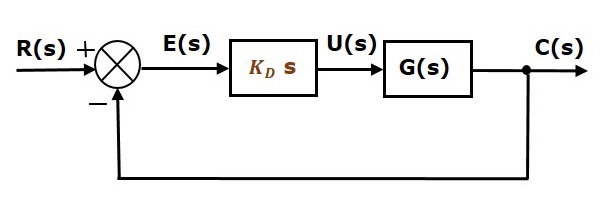
Производный контроллер используется для превращения нестабильной системы управления в стабильную.
Интегральный контроллер
Интегральный контроллер выдает выходной сигнал, который является интегралом от сигнала ошибки.
u(t)=KI inte(t)dt
Применить преобразование Лапласа с обеих сторон —
U(s)= fracKIE(s)s
гидроразрываU(s)Е(ы)= гидроразрываKis
Следовательно, передаточная функция интегрального контроллера равна fracKIs.
Где KI — интегральная постоянная.
Блок-схема единой системы управления с обратной связью и обратной связью вместе со встроенным контроллером показана на следующем рисунке.
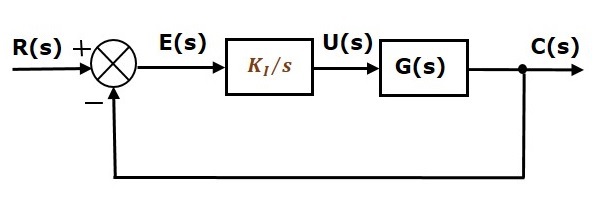
Встроенный контроллер используется для уменьшения ошибки установившегося состояния.
Давайте теперь поговорим о комбинации основных контроллеров.
Пропорциональный производный (PD) контроллер
Пропорциональный производный контроллер создает выход, который представляет собой комбинацию выходов пропорционального и производного контроллеров.
u(t)=KPe(t)+KD frac textde(t) textdt
Применить преобразование Лапласа с обеих сторон —
U(s)=(KP+KDs)E(s)
fracU(s)E(s)=KP+KDs
Следовательно, передаточная функция контроллера пропорциональной производной равна KP+KDs.
Блок-схема системы управления замкнутого контура с отрицательной обратной связью и контроллера пропорциональной производной показана на следующем рисунке.
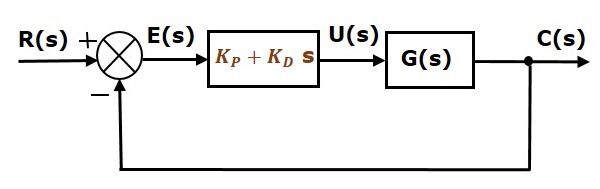
Пропорциональный регулятор производной используется для улучшения стабильности системы управления без влияния на ошибку установившегося состояния.
Пропорциональный интегральный (ПИ) контроллер
Пропорциональный интегральный контроллер создает выход, который представляет собой комбинацию выходов пропорционального и интегрального контроллеров.
u(t)=KPe(t)+KI inte(t)dt
Применить преобразование Лапласа с обеих сторон —
U(s)= left(KP+ fracKIs right)E(s)
гидроразрываU(s)Е(с)=KP+ гидроразрываKis
Следовательно, передаточная функция пропорционального интегрального регулятора равна KP+ fracKIs.
Блок-схема системы управления замкнутого контура с отрицательной обратной связью вместе с пропорциональным интегральным контроллером показана на следующем рисунке.
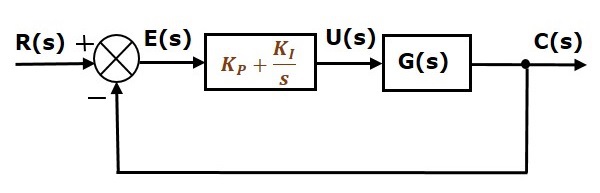
Пропорциональный интегральный регулятор используется для уменьшения ошибки установившегося состояния без влияния на стабильность системы управления.
Пропорциональный интегрально-производный (PID) контроллер
Пропорциональный интегрально-производный контроллер создает выход, который представляет собой комбинацию выходов пропорционального, интегрального и производного контроллеров.
u(t)=KPe(t)+KI inte(t)dt+KD frac textde(t) textdt
Применить преобразование Лапласа с обеих сторон —
U(s)= left(KP+ fracKIs+KDs right)E(s)
fracU(s)E(s)=KP+ fracKIs+KDs
Следовательно, передаточная функция контроллера пропорциональной интегральной производной равна KP+ fracKIs+KDs.
Блок-схема системы управления замкнутого контура с отрицательной обратной связью вместе с пропорционально-интегральным регулятором производной показана на следующем рисунке.
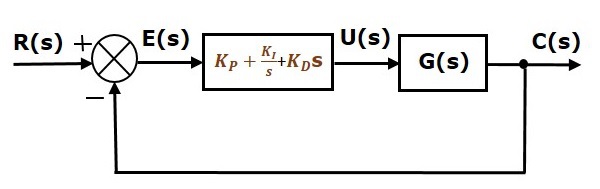
Пропорциональный интегрально-производный регулятор используется для улучшения стабильности системы управления и уменьшения ошибки установившегося состояния.