Z-Transform обладает следующими свойствами:
Свойство линейности
Если x(n) stackrel mathrmZT longleftrightarrowX(Z)
и y(n) stackrel mathrmZT longleftrightarrowY(Z)
Тогда свойство линейности утверждает, что
ax(n)+by(n) stackrel mathrmZT longleftrightarrowaX(Z)+bY(Z)
Time Shifting Свойство
Если x(n) stackrel mathrmZT longleftrightarrowX(Z)
Тогда свойство сдвига во времени утверждает, что
x(nm) stackrel mathrmZT longleftrightarrowz−mX(Z)
Умножение на свойство экспоненциальной последовательности
Если x(n) stackrel mathrmZT longleftrightarrowX(Z)
Тогда умножение на свойство экспоненциальной последовательности гласит, что
$ a ^ n \,. x (n) \ stackrel {\ mathrm {ZT}} {\ longleftrightarrow} X (Z / a) $
Свойство Обратного Времени
Если x(n) stackrel mathrmZT longleftrightarrowX(Z)
Тогда свойство обращения времени утверждает, что
x(−n) stackrel mathrmZT longleftrightarrowX(1/Z)
Дифференцирование в Z-домене ИЛИ Умножение на n Свойство
Если x(n) stackrel mathrmZT longleftrightarrowX(Z)
Тогда умножение на n или дифференцирование в свойстве z-домена утверждает, что
nkx(n) stackrel mathrmZT longleftrightarrow[−1]kzkdkX(Z) overdZK
Собственность свертки
Если x(n) stackrel mathrmZT longleftrightarrowX(Z)
и y(n) stackrel mathrmZT longleftrightarrowY(Z)
Тогда свойство свертки утверждает, что
x(n)∗y(n) stackrel mathrmZT longleftrightarrowX(Z).Y(Z)
Свойство корреляции
Если x(n) stackrel mathrmZT longleftrightarrowX(Z)
и y(n) stackrel mathrmZT longleftrightarrowY(Z)
Тогда свойство корреляции утверждает, что
x(n) otimesy(n) stackrel mathrmZT longleftrightarrowX(Z).Y(Z−1)
Начальные и конечные значения теорем
Теоремы о начальном и конечном значении z-преобразования определены для причинного сигнала.
Теорема начального значения
Для причинного сигнала x (n) теорема начального значения утверждает, что
x(0)= limz to inftyX(z)
Это используется для определения начального значения сигнала без обратного z-преобразования.
Окончательная Теорема Значения
Для причинного сигнала x (n) теорема об окончательном значении утверждает, что
x( infty)= limz to1[z−1]X(z)
Это используется, чтобы найти окончательное значение сигнала без обратного z-преобразования.
Область сходимости (ROC) Z-Transform
Диапазон изменения z, для которого сходится z-преобразование, называется областью сходимости z-преобразования.
Свойства РПЦ Z-преобразований
-
ROC z-преобразования обозначается кружком в z-плоскости.
-
РПЦ не содержит никаких полюсов.
-
Если x (n) является причинной последовательностью конечной продолжительности или правосторонней последовательностью, то ROC является целой z-плоскостью за исключением z = 0.
-
Если x (n) является антикаузальной последовательностью конечной продолжительности или левой стороной последовательности, то ROC является целой z-плоскостью за исключением z = ∞.
-
Если x (n) — причинная последовательность бесконечной продолжительности, ROC является внешней от окружности с радиусом aie | z | > а.
-
Если x (n) — антикаузальная последовательность бесконечной продолжительности, ROC — внутренняя часть круга с радиусом aie | z | <а.
-
Если x (n) — двусторонняя последовательность конечной длительности, то ROC является целой z-плоскостью за исключением z = 0 и z = ∞.
ROC z-преобразования обозначается кружком в z-плоскости.
РПЦ не содержит никаких полюсов.
Если x (n) является причинной последовательностью конечной продолжительности или правосторонней последовательностью, то ROC является целой z-плоскостью за исключением z = 0.
Если x (n) является антикаузальной последовательностью конечной продолжительности или левой стороной последовательности, то ROC является целой z-плоскостью за исключением z = ∞.
Если x (n) — причинная последовательность бесконечной продолжительности, ROC является внешней от окружности с радиусом aie | z | > а.
Если x (n) — антикаузальная последовательность бесконечной продолжительности, ROC — внутренняя часть круга с радиусом aie | z | <а.
Если x (n) — двусторонняя последовательность конечной длительности, то ROC является целой z-плоскостью за исключением z = 0 и z = ∞.
Концепция ROC может быть объяснена следующим примером:
Пример 1: Найти z-преобразование и ROC anu[n]+a−nu[−n−1]
ZT[anu[n]]+ZT[a−nu[−n−1]]=Z overZa+Z overZ−1 overa
$$ ROC: | z | \ gt a \ quad \ quad ROC: | z | \ lt {1 \ over a} $$
Сюжет ROC имеет два условия как> 1 и <1, как вы не знаете, а.
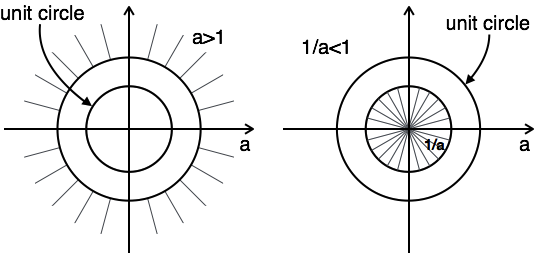
В этом случае нет комбинации ROC.
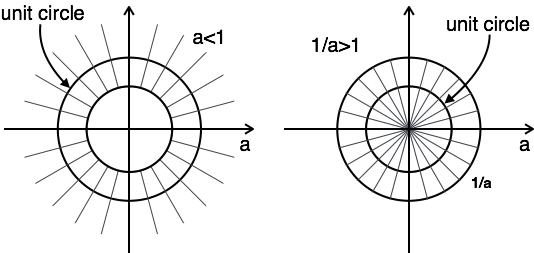
Здесь комбинация ROC из $ a \ lt | z | \ lt {1 \ over a} $
Следовательно, для этой задачи z-преобразование возможно, когда a <1.
Причинность и стабильность
Условие причинности для систем LTI с дискретным временем следующее:
Система LTI с дискретным временем является
-
РПЦ находится за пределами самого внешнего полюса.
-
В передаточной функции H [Z] порядок числителя не может быть больше, чем порядок знаменателя.
РПЦ находится за пределами самого внешнего полюса.
В передаточной функции H [Z] порядок числителя не может быть больше, чем порядок знаменателя.
Условие стабильности для систем LTI с дискретным временем
Система LTI с дискретным временем стабильна, когда
его системная функция H [Z] включает единичную окружность | z | = 1.
все полюсы передаточной функции лежат внутри единичного круга | z | = 1.