Существует идеальная аналогия между векторами и сигналами.
Вектор
Вектор содержит величину и направление. Название вектора обозначается жирным шрифтом, а его величина — светлым.
Пример: V — вектор с величиной V. Рассмотрим два вектора V 1 и V 2, как показано на следующей диаграмме. Пусть составляющая V 1 наряду с V 2 задается C 12 V 2 . Компонент вектора V 1 вместе с вектором V 2 можно получить, взяв перпендикуляр от конца V 1 к вектору V 2, как показано на диаграмме:
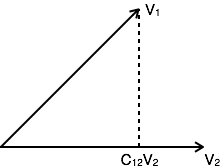
Вектор V 1 можно выразить через вектор V 2.
V 1 = C 12 V 2 + V e
Где Ve — вектор ошибки.
V 1 = C 12 V 2 + V e
Где Ve — вектор ошибки.
Но это не единственный способ выразить вектор V 1 через V 2 . Альтернативные возможности:
V 1 = C 1 V 2 + V e1
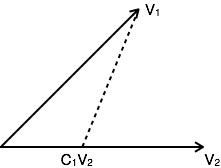
V 1 = C 1 V 2 + V e1
V 2 = C 2 V 2 + V e2
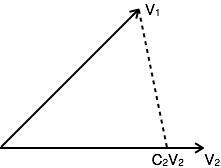
V 2 = C 2 V 2 + V e2
Сигнал ошибки является минимальным для большого значения компонента. Если C 12 = 0, то два сигнала называются ортогональными.
Точечный продукт двух векторов
V 1 . V 2 = V 1 .V 2 cosθ
θ = угол между V1 и V2
V 1 . V 2 = V 2 .V 1
Компоненты V 1 alog n V 2 = V 1 Cos θ = V1.V2 overV2
V 1 . V 2 = V 1 .V 2 cosθ
θ = угол между V1 и V2
V 1 . V 2 = V 2 .V 1
Компоненты V 1 alog n V 2 = V 1 Cos θ = V1.V2 overV2
Из диаграммы составляющие V 1 alog n V 2 = C 12 V 2
V1.V2 overV2=C12V2
RightarrowC12=V1.V2 overV2
Сигнал
Понятие ортогональности может быть применено к сигналам. Рассмотрим два сигнала f 1 (t) и f 2 (t). Подобно векторам, вы можете аппроксимировать f 1 (t) в терминах f 2 (t) как
f 1 (t) = C 12 f 2 (t) + f e (t) для (t 1 <t <t 2 )
Rightarrow f e (t) = f 1 (t) — C 12 f 2 (t)
f 1 (t) = C 12 f 2 (t) + f e (t) для (t 1 <t <t 2 )
Rightarrow f e (t) = f 1 (t) — C 12 f 2 (t)
Одним из возможных способов минимизации ошибки является интегрирование в интервале от t 1 до t 2 .
1 overt2−t1 intt2t1[fe(t)]dt
1 overt2−t1 intt2t1[f1(t)−C12f2(t)]dt
Однако этот шаг также не уменьшает ошибку в значительной степени. Это можно исправить, взяв квадрат функции ошибки.
varepsilon=1 overt2−t1 intt2t1[fe(t)]2dt
Rightarrow1 overt2−t1 intt2t1[fe(t)−C12f2]2dt
Где ε — среднеквадратичное значение сигнала ошибки. Значение C 12, которое минимизирует ошибку, необходимо рассчитать d varepsilon overdC12=0
Rightarrowd overdC12[1 overt2−t1 intt2t1[f1(t)−C12f2(t)]2dt]=0
Rightarrow1 overt2−t1 intt2t1[d overdC12f21(t)−d overdC122f1(t)C12f2(t)+d overdC12f22(t)C212]dt=0
Производные от терминов, которые не имеют C12, равны нулю.
Rightarrow intt2t1−2f1(t)f2(t)dt+2C12 intt2t1[f22(t)]dt=0
Если C12= intt2t1f1(t)f2(t)dt over intt2t1f22(t)dt компонент равен нулю, тогда два сигнала называются ортогональными.
Положите C 12 = 0, чтобы получить условие ортогональности.
0 = intt2t1f1(t)f2(t)dt over intt2t1f22(t)dt
intt2t1f1(t)f2(t)dt=0
Ортогональное векторное пространство
Полный набор ортогональных векторов называется ортогональным векторным пространством. Рассмотрим трехмерное векторное пространство, как показано ниже:
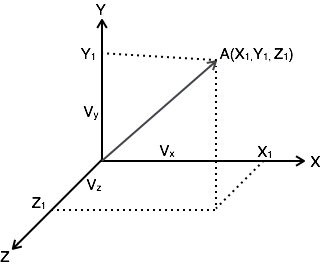
Рассмотрим вектор A в точке (X 1 , Y 1 , Z 1 ). Рассмотрим три единичных вектора (V X , V Y , V Z ) в направлении оси X, Y, Z соответственно. Поскольку эти единичные векторы взаимно ортогональны, он удовлетворяет
$$ V_X. V_X = V_Y. V_Y = V_Z. V_Z = 1 $$
$$ V_X. V_Y = V_Y. V_Z = V_Z. V_X = 0 $$
Вы можете написать выше условия как
$$ V_a. V_b = \ left \ {\ begin {array} {ll} 1 & \ quad a = b \\ 0 & \ quad a \ neq b \ end {array} \ right. $$
Вектор A может быть представлен в терминах его компонентов и единичных векторов как
A=X1VX+Y1VY+Z1VZ................(1)
Любые векторы в этом трехмерном пространстве могут быть представлены только через эти три единичных вектора.
Если вы рассматриваете n-мерное пространство, то любой вектор A в этом пространстве можно представить как
A=X1VX+Y1VY+Z1VZ+...+N1VN.....(2)
Поскольку величина единичных векторов равна единице для любого вектора A
Компонент А вдоль оси х = AV X
Компонента А вдоль оси Y = AV Y
Компонента А вдоль оси Z = AV Z
Аналогично, для n-мерного пространства компонента A вдоль некоторой оси G
=A.VG...............(3)
Подставьте уравнение 2 в уравнение 3.
RightarrowCG=(X1VX+Y1VY+Z1VZ+...+G1VG...+N1VN)VG
= X_1 V_X V_G + Y_1 V_Y V_G + Z_1 V_Z V_G + … + G_1V_G V_G … + N_1V_N V_G
= G_1 \, \, \, \, \, \ text {since} V_G V_G = 1
If V_G V_G \ neq 1 \, \, \ text {т.е.} V_G V_G = k
AV_G = G_1V_G V_G = G_1K
G_1 = {(AV_G) \ over K}
Ортогональное пространство сигнала
Рассмотрим набор из n взаимно ортогональных функций x 1 (t), x 2 (t) … x n (t) на интервале от t 1 до t 2 . Поскольку эти функции ортогональны друг другу, любые два сигнала x j (t), x k (t) должны удовлетворять условию ортогональности. т.е.
\ int_ {t_1} ^ {t_2} x_j (t) x_k (t) dt = 0 \, \, \, \ text {where} \, j \ neq k
\ text {Let} \ int_ {t_1} ^ {t_2} x_ {k} ^ {2} (t) dt = k_k
Пусть функция f (t) может быть аппроксимирована этим пространством ортогональных сигналов путем сложения компонентов вдоль взаимно ортогональных сигналов, т.е.
\, \, \, f (t) = C_1x_1 (t) + C_2x_2 (t) + … + C_nx_n (t) + f_e (t)
\ quad \ quad = \ Sigma_ {r = 1} ^ {n} C_rx_r (t)
\, \, \, f (t) = f (t) — \ Sigma_ {r = 1} ^ n C_rx_r (t)
\, \, \, f (t) = C_1x_1 (t) + C_2x_2 (t) + … + C_nx_n (t) + f_e (t)
\ quad \ quad = \ Sigma_ {r = 1} ^ {n} C_rx_r (t)
\, \, \, f (t) = f (t) — \ Sigma_ {r = 1} ^ n C_rx_r (t)
Средняя квадратура ошибки \ varepsilon = {1 \ over t_2 — t_2} \ int_ {t_1} ^ {t_2} [f_e (t)] ^ 2 dt
= {1 \ over t_2 — t_2} \ int_ {t_1} ^ {t_2} [f [t] — \ sum_ {r = 1} ^ {n} C_rx_r (t)] ^ 2 dt
Компонент, который минимизирует среднеквадратичную ошибку, может быть найден
{d \ varepsilon \ over dC_1} = {d \ varepsilon \ over dC_2} = … = {d \ varepsilon \ over dC_k} = 0
Рассмотрим {d \ varepsilon \ over dC_k} = 0
{d \ over dC_k} [{1 \ over t_2 — t_1} \ int_ {t_1} ^ {t_2} [f (t) — \ Sigma_ {r = 1} ^ n C_rx_r (t)] ^ 2 dt] = 0
Все члены, которые не содержат C k , равны нулю. т.е. в сумме, r = k терм остается, а все остальные термы равны нулю.
\ int_ {t_1} ^ {t_2} — 2 f (t) x_k (t) dt + 2C_k \ int_ {t_1} ^ {t_2} [x_k ^ 2 (t)] dt = 0
\ Rightarrow C_k = {{\ int_ {t_1} ^ {t_2} f (t) x_k (t) dt} \ over {int_ {t_1} ^ {t_2} x_k ^ 2 (t) dt}}
\ Rightarrow \ int_ {t_1} ^ {t_2} f (t) x_k (t) dt = C_kK_k
Средняя квадратическая ошибка
Среднее квадрата ошибки функция f e (t) называется среднеквадратичной ошибкой. Обозначается через ε (эпсилон).
,
\ varepsilon = {1 \ over t_2 — t_1} \ int_ {t_1} ^ {t_2} [f_e (t)] ^ 2dt
\, \, \, \, = {1 \ over t_2 — t_1} \ int_ {t_1} ^ {t_2} [f_e (t) — \ Sigma_ {r = 1} ^ n C_rx_r (t)] ^ 2 дт
\, \, \, \, = {1 \ over t_2 — t_1} [\ int_ {t_1} ^ {t_2} [f_e ^ 2 (t)] dt + \ Sigma_ {r = 1} ^ {n} C_r ^ 2 \ int_ {t_1} ^ {t_2} x_r ^ 2 (t) dt — 2 \ Sigma_ {r = 1} ^ {n} C_r \ int_ {t_1} ^ {t_2} x_r (t) f (t) dt
Вы знаете, что C_ {r} ^ {2} \ int_ {t_1} ^ {t_2} x_r ^ 2 (t) dt = C_r \ int_ {t_1} ^ {t_2} x_r (t) f (d) dt = C_r ^ 2 К_р
\ varepsilon = {1 \ over t_2 — t_1} [\ int_ {t_1} ^ {t_2} [f ^ 2 (t)] dt + \ Sigma_ {r = 1} ^ {n} C_r ^ 2 K_r — 2 \ Sigma_ {r = 1} ^ {n} C_r ^ 2 K_r]
\, \, \, \, = {1 \ over t_2 — t_1} [\ int_ {t_1} ^ {t_2} [f ^ 2 (t)] dt — \ Sigma_ {r = 1} ^ {n} C_r ^ 2 K_r]
\, \ следовательно \ varepsilon = {1 \ over t_2 — t_1} [\ int_ {t_1} ^ {t_2} [f ^ 2 (t)] dt + (C_1 ^ 2 K_1 + C_2 ^ 2 K_2 + … + C_n ^ 2 K_n)]
Приведенное выше уравнение используется для оценки среднеквадратичной ошибки.
Закрытый и полный набор ортогональных функций
Рассмотрим набор из n взаимно ортогональных функций x 1 (t), x 2 (t) … x n (t) на интервале от t 1 до t 2 . Это называется замкнутым и полным набором, когда не существует функции f (t), удовлетворяющей условию \ int_ {t_1} ^ {t_2} f (t) x_k (t) dt = 0
Если эта функция удовлетворяет уравнению \ int_ {t_1} ^ {t_2} f (t) x_k (t) dt = 0 \, \, \ text {for} \, k = 1,2, .. , то f (t) называется ортогональным к каждой функции ортогонального множества. Это множество неполное без f (t). Это становится закрытым и полным набором, когда f (t) включен.
f (t) может быть аппроксимирован этим ортогональным набором путем сложения компонентов вдоль взаимно ортогональных сигналов, т.е.
f (t) = C_1 x_1 (t) + C_2 x_2 (t) + … + C_n x_n (t) + f_e (t)
Если бесконечный ряд C_1 x_1 (t) + C_2 x_2 (t) + … + C_n x_n (t) сходится к f (t), то среднеквадратичная ошибка равна нулю.
Ортогональность в сложных функциях
Если f 1 (t) и f 2 (t) являются двумя комплексными функциями, то f 1 (t) можно выразить через f 2 (t) как
f_1 (t) = C_ {12} f_2 (t) \, \, \, \, \, \, \, \, ..с незначительной ошибкой
Где C_ {12} = {{\ int_ {t_1} ^ {t_2} f_1 (t) f_2 ^ * (t) dt} \ over {\ int_ {t_1} ^ {t_2} | f_2 (t) | ^ 2 dt}}
Где f_2 ^ * (t) = комплексное сопряжение f 2 (t).
Если f 1 (t) и f 2 (t) ортогональны, то C 12 = 0
{\ int_ {t_1} ^ {t_2} f_1 (t) f_2 ^ * (t) dt \ over \ int_ {t_1} ^ {t_2} | f_2 (t) | ^ 2 dt} = 0
\ Rightarrow \ int_ {t_1} ^ {t_2} f_1 (t) f_2 ^ * (dt) = 0
Приведенное выше уравнение представляет условие ортогональности в комплексных функциях.