Мы знаем, что синхронные последовательные схемы меняют (влияют) на свои состояния при каждом положительном (или отрицательном) переходе тактового сигнала на основе входа. Таким образом, это поведение синхронных последовательных цепей может быть представлено в графической форме, и это известно как диаграмма состояний .
Синхронная последовательная схема также называется конечным автоматом (FSM), если она имеет конечное число состояний. Есть два типа автоматов.
- Мили State State
- Moore State Machine
Теперь давайте поговорим об этих двух конечных автоматах один за другим.
Мили State State
Конечный автомат называется конечным автоматом Мили, если выходные данные зависят как от текущих входных данных, так и от текущих состояний. Блок-схема конечного автомата Мили показана на следующем рисунке.
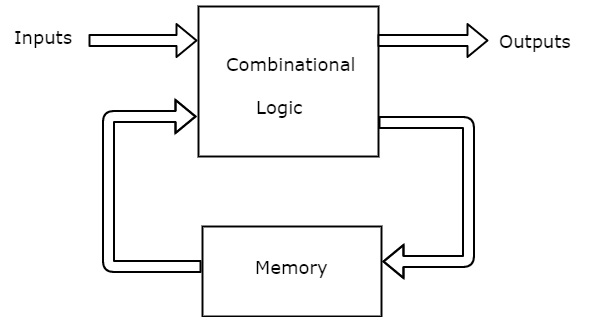
Как показано на рисунке, в конечном автомате Мили присутствуют две части. Это комбинационная логика и память. Память полезна для предоставления некоторых или части предыдущих выходов (текущих состояний) в качестве входов комбинационной логики.
Таким образом, на основе текущих входных данных и текущих состояний конечный автомат Мили производит выходные данные. Поэтому выходы будут действительны только при положительном (или отрицательном) переходе тактового сигнала.
Диаграмма состояний конечного автомата Мили показана на следующем рисунке.
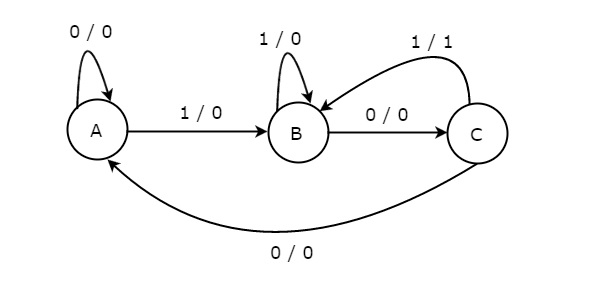
На рисунке выше представлены три состояния, а именно A, B и C. Эти состояния помечены внутри окружностей, и каждый кружок соответствует одному состоянию. Переходы между этими состояниями обозначены направленными линиями. Здесь 0/0, 1/0 и 1/1 обозначает ввод / вывод . На приведенном выше рисунке есть два перехода из каждого состояния в зависимости от значения ввода x.
В общем, число состояний, требуемых в автомате состояний Мили, меньше или равно числу состояний, требуемых в автомате состояний Мура. Для каждого конечного автомата Мили существует эквивалентный конечный автомат Мура.
Moore State Machine
Конечный автомат называется автоматом Мура, если выходные данные зависят только от текущих состояний. Блок-схема конечного автомата Мура показана на следующем рисунке.
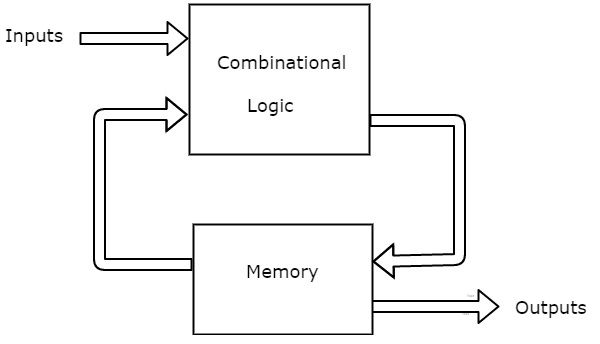
Как показано на рисунке, в автомате Мура присутствуют две части. Это комбинационная логика и память. В этом случае текущие входные данные и текущие состояния определяют следующие состояния. Итак, исходя из следующих состояний, конечный автомат Мура выдает выходные данные. Поэтому выходы будут действительны только после перехода в состояние.
Диаграмма состояний конечного автомата Мура показана на следующем рисунке.
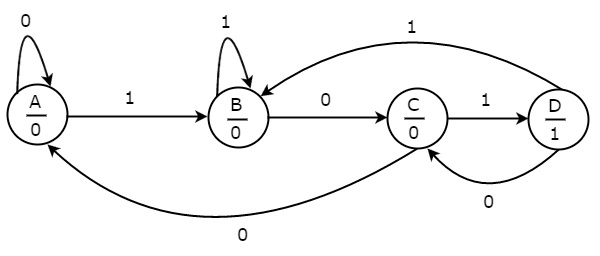
На рисунке выше представлены четыре состояния, а именно A, B, C и D. Эти состояния и соответствующие выходные данные помечены внутри окружностей. Здесь только входное значение помечено на каждом переходе. На приведенном выше рисунке есть два перехода из каждого состояния в зависимости от значения ввода x.
В общем, число состояний, требуемых в автомате состояний Мура, больше или равно числу состояний, требуемых в автомате состояний Мили. Для каждого конечного автомата Мура существует эквивалентный конечный автомат Мили. Итак, исходя из требования, мы можем использовать один из них.