В этой главе мы узнаем о компенсаторах линии задержки в радиолокационных системах. Как следует из названия, линия задержки вводит определенную величину задержки. Таким образом, линия задержки в основном используется в компенсаторе линии задержки, чтобы ввести задержку времени повторения импульса.
Подавитель линии задержки представляет собой фильтр, который устраняет составляющие постоянного тока эхо-сигналов, полученных от стационарных целей. Это означает, что он допускает компоненты переменного тока эхо-сигналов, полученных от нестационарных целей, то есть движущихся целей.
Типы подавителей линии задержки
Компенсаторы линии задержки могут быть классифицированы на следующие два типа в зависимости от количества линий задержки, которые присутствуют в ней.
- Подавитель одиночной линии задержки
- Линейка с двойной задержкой
В наших последующих разделах мы обсудим больше об этих двух компенсаторах линии задержки.
Подавитель одиночной линии задержки
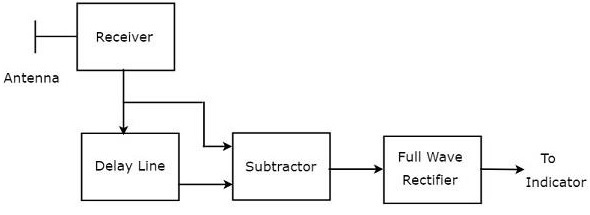
Комбинация линии задержки и вычитателя известна как компенсатор линии задержки. Это также называется однократной задержкой линии задержки. Блок-схема приемника MTI с одним подавителем линии задержки показана на рисунке ниже.
Мы можем записать математическое уравнение принятого эхо-сигнала после эффекта Доплера как —
V1=A sin left[2 pifdt− phi0 right]Equation1
Куда,
А — амплитуда видеосигнала
fd — доплеровская частота
phio — фазовый сдвиг, он равен 4 piftRo/C
Мы получим вывод средства подавления строки задержки , заменив t на t−TP в уравнении 1.
V2=A sin left[2 pifd left(t−TP right)− phi0 right]Equation2
Куда,
TP — время повторения импульсов
Мы получим результат вычитания путем вычитания уравнения 2 из уравнения 1.
V1−V2=A sin left[2 pifdt− phi0 right]−A sin left[2 pifd left(t−TP right)− phi0 right]
RightarrowV1−V2=2A sin left[ frac2 pifdt− phi0− left[2 pifd left(t−TP right)− phi0 right]2 right] cos left[ frac2 pifdt− phio+2 pifd left(t−TP right)− phi02 right]
V1−V2=2A sin left[ frac2 pifdTP2 right] cos left[ frac2 pifd left(2t−TP right)−2 phi02 right]
RightarrowV1−V2=2A sin left[ pifdTp right] cos left[2 pifd left(t− fracTP2 right)− phi0 right]Уравнение3
Выход вычитателя применяется как вход для выпрямителя полной волны. Таким образом, вывод выпрямителя Full Wave выглядит так, как показано на следующем рисунке. Это не что иное, как частотная характеристика подавителя линии задержки.
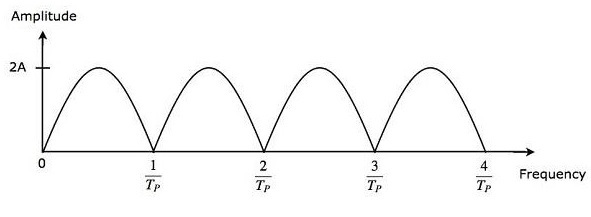
Из уравнения 3 мы можем наблюдать, что частотная характеристика средства подавления одиночной линии задержки становится равной нулю, когда pifdTP равно целому числу, кратному pi. Это означает, что pifdTP равно n pi Математически это можно записать как
pifdTP=n pi
RightarrowfdTP=n
Rightarrowfd= fracnTPУравнение4
Из уравнения 4 можно сделать вывод, что частотная характеристика компенсатора одиночной линии задержки становится равной нулю, когда доплеровская частота fd равна целому числу, кратному обратной величине времени повторения импульса TP.
Нам известно следующее соотношение между временем повторения импульса и частотой повторения импульса.
fd= гидроразрыва1TP
Rightarrow frac1TP=fPEquation5
Мы получим следующее уравнение, подставив уравнение 5 в уравнение 4.
Rightarrowfd=nfPEquation6
Из уравнения 6 можно сделать вывод, что частотная характеристика компенсатора одиночной линии задержки становится равной нулю, когда доплеровская частота, fd, равна целым кратным частоты повторения импульсов fP.
Слепые скорости
Из того, что мы узнали до сих пор, подавитель одиночной линии задержки устраняет компоненты постоянного тока эхо-сигналов, полученных от стационарных целей, когда n равно нулю. В дополнение к этому он также устраняет компоненты переменного тока эхо-сигналов, принимаемых от нестационарных целей, когда доплеровская частота fd равна целым (отличным от нуля) кратным частоты повторения импульсов fP.
Таким образом, относительные скорости, для которых частотная характеристика компенсатора одиночной линии задержки становится равной нулю, называются слепыми скоростями . Математически мы можем записать выражение для слепой скорости vn как —
Vn= гидроразрывап Lambda2TPУравнение7
Rightarrowvn= fracn lambdafP2Equation8
Куда,
n — это целое число, равное 1, 2, 3 и т. д.
lambda — рабочая длина волны
Пример задачи
Радар MTI работает на частоте 6ГГцсчастотойповторенияимпульсов 1 КГц. Найдите первую, вторую и третью слепые скорости этого радара.
Решение
Дано,
Рабочая частота MTI Radar, f=6ГГц
Частота повторения импульсов, $ f_P = 1 кГц.
Ниже приведена формула для рабочей длины волны lambda с точки зрения рабочей частоты, f.
Lambda= гидроразрываC,F
Замените C=3 times108m/sec и f=6GHZ в вышеприведенном уравнении.
Lambda= гидроразрыва3 times1086 times109
Rightarrow lambda=0,05м
Таким образом, рабочая длина волны lambda равна 0,05млн.,Когдарабочаячастотаfсоставляет 6 ГГц.
Мы знаем следующую формулу для слепой скорости .
vn= fracn lambdafp2
Подставив n = 1,2 & 3 в вышеприведенном уравнении, мы получим следующие уравнения для первой, второй и третьей скоростей блайндов соответственно.
v1= frac1 times lambdafp2= frac lambdafp2
v2= frac2 times lambdafp2=2 left( frac lambdafp2 right)=2v1
v3= frac3 times lambdafp2=3 left( frac lambdafp2 right)=3v1
Подставим значения lambda и fP в уравнение первой слепой скорости.
v1= frac0.05 times1032
Rightarrowv1=25м/с
Следовательно, первая слепая скорость v1 для данных спецификаций равна 25m/sec.
Мы получим значения второй и третьей скоростей блайндов как 50м/с и 75м/с соответственно, подставив значение ?1 в уравнения второй и третьей скоростей блайндов.
Линейка с двойной задержкой
Мы знаем, что один компенсатор строки задержки состоит из линии задержки и вычитателя. Если два таких компенсатора линии задержки каскадируются вместе, то эта комбинация называется Двойным компенсатором линии задержки. Блок-схема компенсатора линии двойной задержки показана на следующем рисунке.

Пусть p left(t right) и q left(t right) будут входом и выходом первого компенсатора линии задержки. Мы получим следующее математическое соотношение из первого компенсатора линии задержки .
q left(t right)=p left(t right)−p left(t−TP right)Equation9
Выход первого подавителя строки задержки применяется как вход для второго подавителя строки задержки. Следовательно, q left(t right) будет входом второго компенсатора линии задержки. Пусть r left(t right) будет выводом второго компенсатора линии задержки. Мы получим следующее математическое соотношение из второго компенсатора линии задержки .
r left(t right)=q left(t right)−q left(t−TP right)Equation10
Замените t на t-T_P в уравнении 9.
q \ left (t-T_P \ right) = p \ left (t-T_P \ right) -p \ left (t-T_P-T_P \ right)
q \ left (t-T_P \ right) = p \ left (t-T_P \ right) -p \ left (t-2T_P \ right) \: \: \: \: \: Уравнение \: 11
Замените уравнение 9 и уравнение 11 в уравнении 10.
r \ left (t \ right) = p \ left (t \ right) -p \ left (t-T_P \ right) — \ left [p \ left (t-T_P \ right) -p \ left (t -2T_P \ right) \ right]
\ Rightarrow r \ left (t \ right) = p \ left (t \ right) -2p \ left (t-T_P \ right) + p \ left (t-2T_P \ right) \: \: \: \ : \: Уравнение \: 12
Преимущество двойной линии подавления задержки заключается в том, что она широко отвергает беспорядок. Выход двух компенсаторов линии задержки, которые расположены каскадно, будет равен квадрату выходного сигнала одного компенсатора линии задержки.
Таким образом, величина выходного сигнала компенсатора линии двойной задержки, присутствующего в приемнике MTI Radar, будет равна 4A ^ 2 \ left (\ sin \ left [\ pi f_dT_P \ right] \ right) ^ 2 .
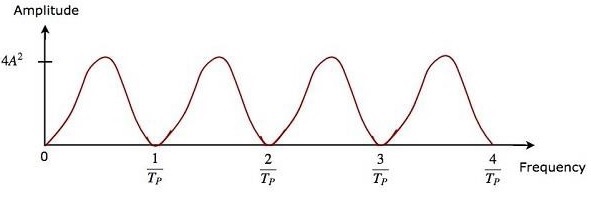
Частотные характеристики как устройства подавления линии с двойной задержкой, так и каскадной комбинации двух устройств подавления линии с задержкой одинаковы. Преимущество подавителя линии задержки во временной области состоит в том, что он может работать для всех частотных диапазонов.