Если CW Doppler Radar использует частотную модуляцию, то этот радар называется FMCW Doppler Radar или просто FMCW Radar . Он также называется радиолокатором с непрерывной частотной модуляцией или радиолокатором CWFM. Он измеряет не только скорость цели, но и расстояние до цели от радара.
Блок-схема радара FMCW
Радиолокатор FMCW в основном используется в качестве радиолокационного высотомера для измерения точной высоты при посадке самолета. На следующем рисунке показана блок-схема радара FMCW —
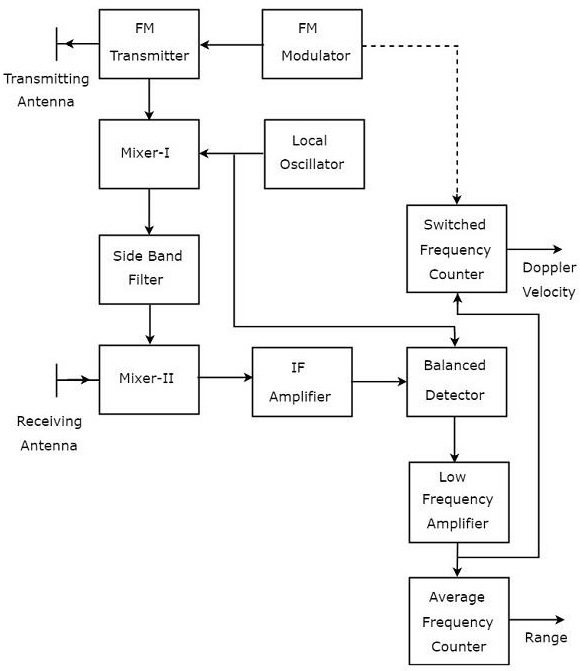
Радар FMCW содержит две антенны — передающую антенну и принимающую антенну, как показано на рисунке. Передающая антенна передает сигнал, а принимающая антенна принимает эхо-сигнал.
Блок-схема радара FMCW выглядит аналогично блок-схеме радара CW. Он содержит несколько модифицированных блоков и некоторые другие блоки в дополнение к блокам, которые присутствуют в блок-схеме CW Radar. Функция каждого блока FMCW Radar указана ниже.
FM-модулятор — он генерирует частотно-модулированный (FM) сигнал с переменной частотой fo left(t right) и применяется к FM-передатчику.
FM-передатчик — передает FM-сигнал с помощью передающей антенны. Выход FM-передатчика также подключен к Mixer-I.
Локальный генератор — В общем, локальный генератор используется для получения радиочастотного сигнала. Но здесь он используется для получения сигнала, имеющего промежуточную частоту, fIF. Выход локального генератора подключен к микшеру-I и симметричному детектору.
Mixer-I — Mixer может производить как сумму, так и разницу частот, которые к нему применяются. Сигналы с частотами fo left(t right) и fIF подаются на Mixer-I. Таким образом, Mixer-I будет генерировать выходные данные с частотой fo left(t right)+fIF или fo left(t right)−fIF.
Фильтр боковой полосы — он допускает только частоты одной боковой полосы, то есть либо частоты верхней боковой полосы, либо частоты нижней боковой полосы. Фильтр боковой полосы, показанный на рисунке, производит только частоту нижней полосы. то есть fo left(t right)−fIF.
Mixer-II — Mixer может производить как сумму, так и разницу частот, которые к нему применяются. Сигналы с частотами fo left(t right)−fIF и fo left(tT right) подаются на Mixer-II. Таким образом, Mixer-II будет производить вывод с частотой: либо fo left(tT right)+fo left(t right)−fIF, либо fo left(tT right)−fo влево(t right)+fIF.
Усилитель ПЧ — усилитель ПЧ усиливает сигнал промежуточной частоты (ПЧ). Усилитель ПЧ, показанный на рисунке, усиливает сигнал с частотой fo left(tT right)−fo left(t right)+fIF. Этот усиленный сигнал подается в качестве входа на сбалансированный детектор.
Сбалансированный детектор — используется для получения выходного сигнала с частотой fo left(tT right)−fo left(t right) из двух примененных входных сигналов, которые имеют частоты fo left(tT right)−fo left(t right)+fIF и fIF. Выход сбалансированного детектора используется в качестве входа для усилителя низкой частоты.
Усилитель низких частот — усиливает выход сбалансированного детектора до требуемого уровня. Выход низкочастотного усилителя подается на счетчик с переключаемой частотой и на счетчик средней частоты.
Счетчик частоты переключения — полезен для получения значения доплеровской скорости.
Счетчик средней частоты — это полезно для получения значения диапазона.