Базовый радар использует одну и ту же антенну для передачи и приема сигналов. Мы можем использовать этот тип радара, когда цель неподвижна, то есть не движется, и / или когда этот радар может работать с импульсным сигналом.
Радар, который работает с непрерывным сигналом (волной) для обнаружения нестационарных целей, называется непрерывным волновым радаром или просто CW Radar . Этот радар требует двух антенн. Среди которых одна антенна используется для передачи сигнала, а другая антенна используется для приема сигнала.
Блок-схема CW Radar
Мы знаем, что CW Doppler Radar содержит две антенны — передающую антенну и принимающую антенну. На следующем рисунке показана блок-схема CW Radar —
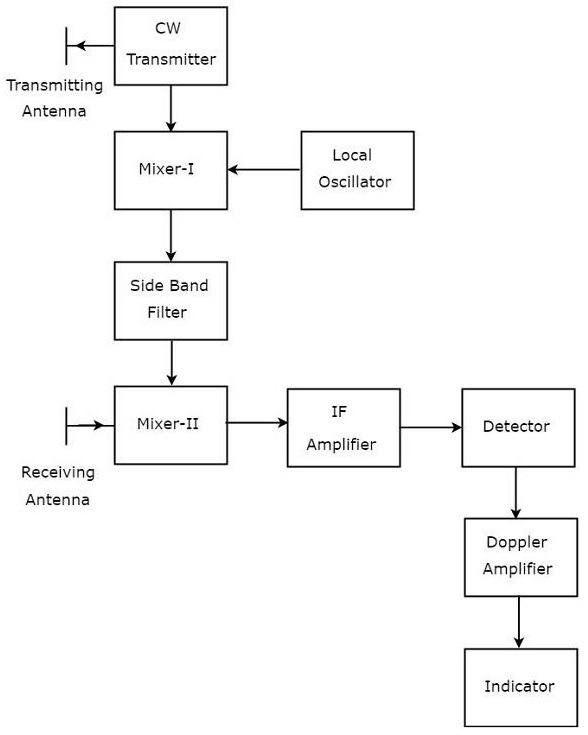
Блок-схема доплеровского радара CW содержит набор блоков, и функция каждого блока указана ниже.
-
CW Transmitter — генерирует аналоговый сигнал с частотой $ f_o $. Выход передатчика CW подключен как к передающей антенне, так и к Mixer-I.
-
Локальный генератор — генерирует сигнал с частотой $ f_l $. Выход локального генератора подключен к микшеру-I.
-
Mixer-I — Mixer может производить как сумму, так и разницу частот, которые к нему применяются. Сигналы, имеющие частоты $ f_o $ и $ f_l $, подаются на Mixer-I. Итак, Mixer-I выдаст выходные данные с частотами $ f_o + f_l $ или $ f_o − f_l $.
-
Фильтр боковой полосы — Как следует из названия, фильтр боковой полосы допускает определенные частоты боковой полосы — либо частоты верхней боковой полосы, либо частоты нижней боковой полосы. Фильтр боковой полосы, показанный на приведенном выше рисунке, генерирует только частоту верхней боковой полосы, то есть $ f_o + f_l $.
-
Mixer-II — Mixer может производить как сумму, так и разницу частот, которые к нему применяются. Сигналы, имеющие частоты $ f_o + f_l $ и $ f_o \ pm f_d $, подаются на Mixer-II. Итак, Mixer-II будет выдавать выходные данные с частотами 2 $ f_o + f_l \ pm f_d $ или $ f_l \ pm f_d $.
-
Усилитель ПЧ — усилитель ПЧ усиливает сигнал промежуточной частоты (ПЧ). Усилитель ПЧ, показанный на рисунке, допускает только промежуточную частоту $ f_l \ pm f_d $ и усиливает ее.
-
Детектор — обнаруживает сигнал с доплеровской частотой $ f_d $.
-
Допплеровский усилитель. Как следует из названия, доплеровский усилитель усиливает сигнал, имеющий доплеровскую частоту, $ f_d $.
-
Индикатор — указывает относительную скорость, относящуюся к информации, и является ли цель входящей или исходящей.
CW Transmitter — генерирует аналоговый сигнал с частотой $ f_o $. Выход передатчика CW подключен как к передающей антенне, так и к Mixer-I.
Локальный генератор — генерирует сигнал с частотой $ f_l $. Выход локального генератора подключен к микшеру-I.
Mixer-I — Mixer может производить как сумму, так и разницу частот, которые к нему применяются. Сигналы, имеющие частоты $ f_o $ и $ f_l $, подаются на Mixer-I. Итак, Mixer-I выдаст выходные данные с частотами $ f_o + f_l $ или $ f_o − f_l $.
Фильтр боковой полосы — Как следует из названия, фильтр боковой полосы допускает определенные частоты боковой полосы — либо частоты верхней боковой полосы, либо частоты нижней боковой полосы. Фильтр боковой полосы, показанный на приведенном выше рисунке, генерирует только частоту верхней боковой полосы, то есть $ f_o + f_l $.
Mixer-II — Mixer может производить как сумму, так и разницу частот, которые к нему применяются. Сигналы, имеющие частоты $ f_o + f_l $ и $ f_o \ pm f_d $, подаются на Mixer-II. Итак, Mixer-II будет выдавать выходные данные с частотами 2 $ f_o + f_l \ pm f_d $ или $ f_l \ pm f_d $.
Усилитель ПЧ — усилитель ПЧ усиливает сигнал промежуточной частоты (ПЧ). Усилитель ПЧ, показанный на рисунке, допускает только промежуточную частоту $ f_l \ pm f_d $ и усиливает ее.
Детектор — обнаруживает сигнал с доплеровской частотой $ f_d $.
Допплеровский усилитель. Как следует из названия, доплеровский усилитель усиливает сигнал, имеющий доплеровскую частоту, $ f_d $.
Индикатор — указывает относительную скорость, относящуюся к информации, и является ли цель входящей или исходящей.
Радары CW Doppler дают точное измерение относительных скоростей . Следовательно, они используются в основном там, где информация о скорости важнее, чем фактический диапазон.