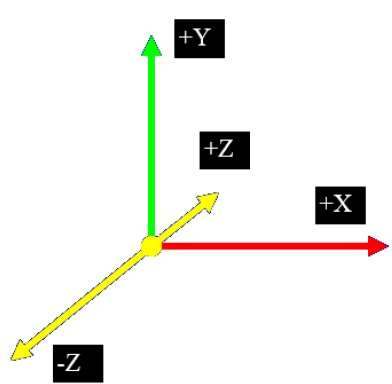
В 2D-системе мы используем только две координаты X и Y, но в 3D добавляется дополнительная координата Z. Методы трехмерной графики и их применение являются основополагающими для индустрии развлечений, игр и компьютерного дизайна. Это постоянная область исследований в области научной визуализации.
Кроме того, компоненты трехмерной графики в настоящее время являются частью почти каждого персонального компьютера и, хотя традиционно предназначены для интенсивного графического программного обеспечения, такого как игры, они все чаще используются другими приложениями.
Параллельная проекция
Параллельная проекция отбрасывает координаты z, а параллельные линии от каждой вершины объекта расширяются до тех пор, пока они не пересекают плоскость обзора. В параллельной проекции мы указываем направление проекции вместо центра проекции.
В параллельной проекции расстояние от центра проекции до проектной плоскости бесконечно. В этом типе проекции мы соединяем спроецированные вершины отрезками, которые соответствуют соединениям на исходном объекте.
Параллельные проекции менее реалистичны, но они хороши для точных измерений. В проекциях этого типа параллельные линии остаются параллельными, а углы не сохраняются. Различные типы параллельных проекций показаны в следующей иерархии.
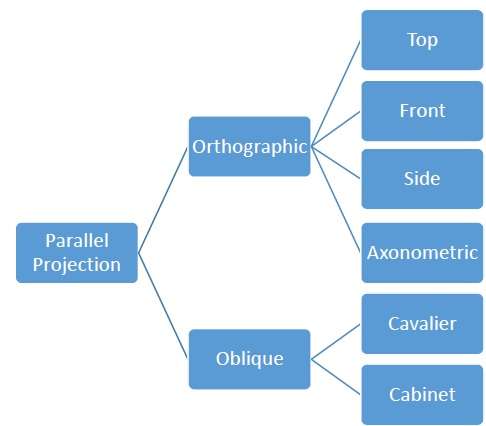
Ортографическая проекция
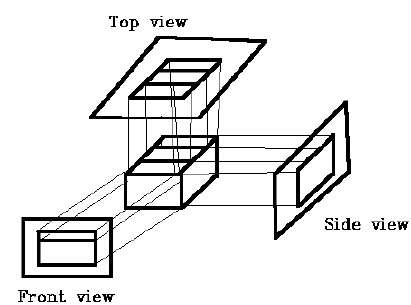
В ортографической проекции направление проекции нормальное к проекции плоскости. Есть три типа орфографических проекций —
- Фронтальная проекция
- Топ проекция
- Боковая проекция
Косая проекция
В наклонной проекции направление проекции не является нормальным для проекции плоскости. В косой проекции мы можем видеть объект лучше, чем в ортографической проекции.
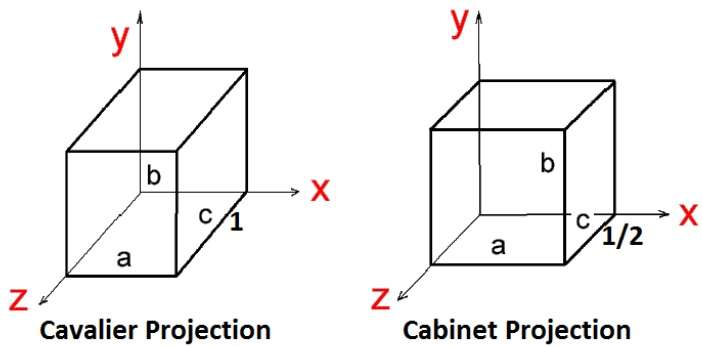
Существует два типа наклонных проекций — Кавалер и Кабинет . Проекция Кавалера составляет 45 ° с плоскостью проекции. Проекция прямой, перпендикулярной плоскости обзора, имеет ту же длину, что и сама линия в проекции Кавалера. В кавалерной проекции факторы ракурса для всех трех основных направлений одинаковы.
Проекция шкафа составляет угол 63,4 ° с плоскостью проекции. В проекции шкафа линии, перпендикулярные поверхности обзора, проецируются на ½ их фактической длины. Обе проекции показаны на следующем рисунке —
Изометрические проекции
Ортогональные проекции, которые показывают более одной стороны объекта, называются аксонометрическими ортографическими проекциями . Наиболее распространенной аксонометрической проекцией является изометрическая проекция, в которой плоскость проекции пересекает каждую ось координат в системе координат модели на равном расстоянии. В этой проекции параллельность линий сохраняется, а углы не сохраняются. На следующем рисунке показана изометрическая проекция —
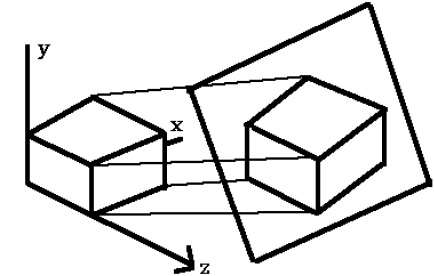
Перспективная проекция
В перспективной проекции расстояние от центра проекции до проектной плоскости конечно, и размер объекта изменяется обратно пропорционально расстоянию, которое выглядит более реалистичным.
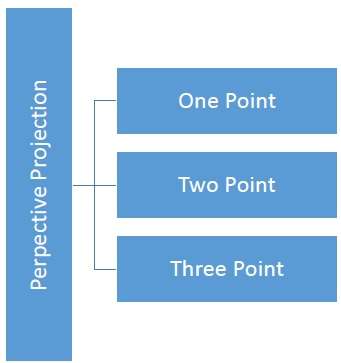
Расстояние и углы не сохраняются и параллельные линии не остаются параллельными. Вместо этого все они сходятся в одной точке, называемой центром проекции или контрольной точкой проекции . Есть 3 типа перспективных проекций, которые показаны на следующем графике.
-
Проекция одной точки зрения проста для рисования.
-
Двухточечная проекция дает лучшее представление о глубине.
-
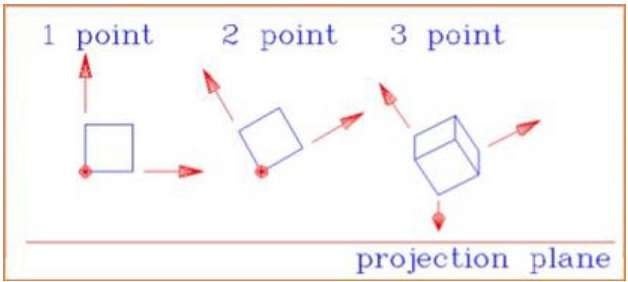
Трехточечная перспективная проекция наиболее трудна для рисования.
Проекция одной точки зрения проста для рисования.
Двухточечная проекция дает лучшее представление о глубине.
Трехточечная перспективная проекция наиболее трудна для рисования.
На следующем рисунке показаны все три типа перспективной проекции —
Перевод
В 3D-переводе мы передаем координату Z вместе с координатами X и Y. Процесс перевода в 3D похож на 2D перевод. Перевод перемещает объект в другую позицию на экране.
На следующем рисунке показан эффект перевода —
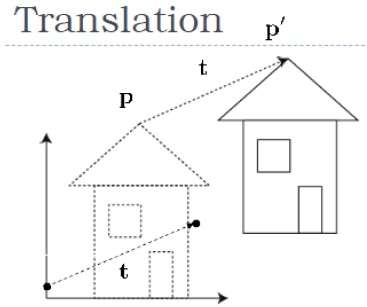
Точка может быть переведена в 3D путем добавления координаты перевода (tx,ty,tz) к исходной координате (X, Y, Z), чтобы получить новую координату (X ‘, Y ‘, Z’).
T = \ begin {bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 & 0 & 0 & 0 & 1 & 0 \\ t_ {x} & t_ {y} & t_ {z} & 1 \\ \ end {bmatrix}
P ‘= P ∙ T
[X ′ \: \: Y ′ \: \: Z ′ \: \: 1] \: = \: [X \: \: Y \: \: Z \: \: 1] \: \ begin { bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 1 & 0 \\ t_ {x} & t_ {y} & t_ {z} & 1 \\ \ end {bmatrix}
=[X+txY+tyZ+tz1]