В этой главе мы обсудим, что такое адаптивный нечеткий контроллер и как он работает. Adaptive Fuzzy Controller имеет несколько настраиваемых параметров, а также встроенный механизм для их настройки. Адаптивный контроллер был использован для повышения производительности контроллера.
Основные шаги для реализации адаптивного алгоритма
Давайте теперь обсудим основные этапы реализации адаптивного алгоритма.
-
Сбор наблюдаемых данных — наблюдаемые данные собираются для расчета производительности контроллера.
-
Регулировка параметров контроллера — Теперь с помощью производительности контроллера будет произведен расчет настройки параметров контроллера.
-
Улучшение производительности контроллера — на этом этапе параметры контроллера настраиваются для улучшения производительности контроллера.
Сбор наблюдаемых данных — наблюдаемые данные собираются для расчета производительности контроллера.
Регулировка параметров контроллера — Теперь с помощью производительности контроллера будет произведен расчет настройки параметров контроллера.
Улучшение производительности контроллера — на этом этапе параметры контроллера настраиваются для улучшения производительности контроллера.
Операционные концепции
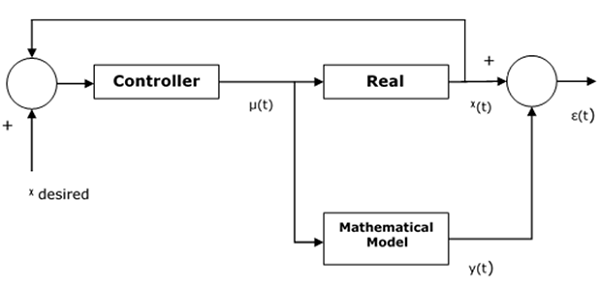
Конструкция контроллера основана на предполагаемой математической модели, которая напоминает реальную систему. Ошибка между реальной системой и ее математическим представлением вычисляется, и если она относительно незначительна, чем предполагается, что модель работает эффективно.
Пороговая константа, которая устанавливает границу эффективности контроллера, также существует. Управляющий вход подается как в реальную систему, так и в математическую модель. Здесь предположим, что x left(t right) — результат работы реальной системы, а y left(t right) — результат математической модели. Тогда ошибка epsilon left(t right) может быть рассчитана следующим образом:
epsilon left(t right)=x left(t right)−y left(t right)
Здесь x требуемый — это вывод, который мы хотим получить из системы, а mu left(t right) — это выходной сигнал, поступающий от контроллера и идущий как к реальной, так и к математической модели.
Следующая диаграмма показывает, как функция ошибок отслеживается между выводом реальной системы и математической моделью:
Параметризация системы
Нечеткий контроллер, конструкция которого основана на нечеткой математической модели, будет иметь следующую форму нечетких правил:
Правило 1 — ЕСЛИ x1 left(tn right) inX11AND...ANDxi left(tn right) inX1i
THEN mu1 left(tn right)=K11x1 left(tn right)+K12x2 left(tn right)+...+K1ixi left(tn right)
Правило 2 — ЕСЛИ x1 left(tn right) inX21AND...ANDxi left(tn right) inX2i
THEN mu2 left(tn right)=K21x1 left(tn right)+K22x2 left(tn right)+...+K2ixi left(tn right)
,
,
,
Правило j — ЕСЛИ x1 left(tn right) inXk1AND...ANDxi left(tn right) inXki
THEN muj left(tn right)=Kj1x1 left(tn right)+Kj2x2 left(tn right)+...+Kjixi left(tn right)
Приведенный выше набор параметров характеризует контроллер.
Механизм регулировки
Параметры контроллера настраиваются для улучшения производительности контроллера. Процесс расчета корректировки параметров является корректирующим механизмом.
Математически, пусть theta left(n right) будет набором параметров, которые нужно скорректировать в момент времени t=tn. Корректировка может быть пересчетом параметров,
theta left(n right)= Theta left(D0,D1,...,Dn right)
Здесь Dn — данные, собранные в момент времени t=tn.
Теперь эта формулировка переформулируется обновлением набора параметров на основе его предыдущего значения, как,
theta left(n right)= phi( thetan−1,Dn)
Параметры для выбора адаптивного нечеткого контроллера
Для выбора адаптивного нечеткого контроллера необходимо учитывать следующие параметры:
Может ли система быть полностью аппроксимирована нечеткой моделью?
Если система может быть полностью аппроксимирована нечеткой моделью, доступны ли параметры этой нечеткой модели или они должны быть определены онлайн?
Если система не может быть полностью аппроксимирована нечеткой моделью, может ли она быть кусочно аппроксимирована набором нечеткой модели?
Если система может быть аппроксимирована набором нечетких моделей, имеют ли эти модели одинаковый формат с разными параметрами или они имеют разные форматы?
Если система может быть аппроксимирована набором нечетких моделей, имеющих один и тот же формат, каждая с разным набором параметров, доступны ли эти наборы параметров или они должны быть определены онлайн?