Частота дискретизации сигнала должна быть выше, чем частота Найквиста, чтобы добиться лучшей дискретизации. Если этот интервал дискретизации в дифференциальной ИКМ значительно уменьшается, разность амплитуд между выборками очень мала, как если бы разность составляла 1-битовое квантование , тогда размер шага будет очень малым, то есть Δ (дельта).
Дельта-модуляция
Тип модуляции, где частота дискретизации намного выше и при которой размер шага после квантования имеет меньшее значение, такая модуляция называется дельта-модуляцией .
Особенности дельта-модуляции
Ниже приведены некоторые особенности дельта-модуляции.
-
Вход с избыточной дискретизацией используется для полного использования корреляции сигнала.
-
Дизайн квантования прост.
-
Входная последовательность намного выше, чем скорость Найквиста.
-
Качество умеренное.
-
Конструкция модулятора и демодулятора проста.
-
Лестничная аппроксимация выходного сигнала.
-
Размер шага очень мал, т. Е. Δ (дельта).
-
Скорость передачи данных может быть выбрана пользователем.
-
Это предполагает более простую реализацию.
Вход с избыточной дискретизацией используется для полного использования корреляции сигнала.
Дизайн квантования прост.
Входная последовательность намного выше, чем скорость Найквиста.
Качество умеренное.
Конструкция модулятора и демодулятора проста.
Лестничная аппроксимация выходного сигнала.
Размер шага очень мал, т. Е. Δ (дельта).
Скорость передачи данных может быть выбрана пользователем.
Это предполагает более простую реализацию.
Дельта-модуляция — это упрощенная форма метода DPCM, также рассматриваемая как 1-битная схема DPCM . При уменьшении интервала выборки корреляция сигнала будет выше.
Дельта модулятор
Дельта-модулятор состоит из 1-битного квантователя и цепи задержки, а также двух летних цепей. Ниже приведена блок-схема дельта-модулятора.
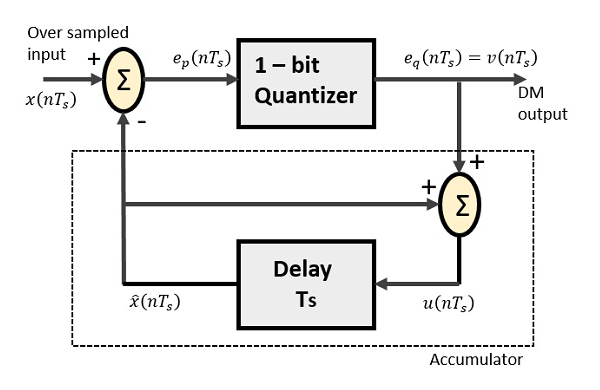
Схема предиктора в DPCM заменяется простой схемой задержки в DM.
Из приведенной выше диаграммы мы имеем обозначения как —
-
x(nTs) = за выборочный ввод
-
ep(nTs) = летний результат и вход квантователя
-
eq(nTs) = выход квантователя = v(nTs)
-
widehatx(nTs) = выход схемы задержки
-
u(nTs) = вход цепи задержки
x(nTs) = за выборочный ввод
ep(nTs) = летний результат и вход квантователя
eq(nTs) = выход квантователя = v(nTs)
widehatx(nTs) = выход схемы задержки
u(nTs) = вход цепи задержки
Используя эти обозначения, теперь мы попытаемся выяснить процесс дельта-модуляции.
ep(nTs)=x(nTs)− widehatx(nTs)
——— уравнение 1
=x(nTs)−u([n−1]Ts)
=x(nTs)−[ widehatx[[n−1]Ts]+v[[n−1]Ts]]
——— уравнение 2
В дальнейшем,
$ v (nT_ {s}) = e_ {q} (nT_ {s}) = S.sig. [e_ {p} (nT_ {s})]]
——— уравнение 3
u(nTs)= widehatx(nTs)+eq(nTs)
Куда,
-
widehatx(nTs) = предыдущее значение схемы задержки
-
eq(nTs) = выход квантователя = v(nTs)
widehatx(nTs) = предыдущее значение схемы задержки
eq(nTs) = выход квантователя = v(nTs)
Следовательно,
u(nTs)=u([n−1]Ts)+v(nTs)
——— уравнение 4
Что значит,
Настоящий вход блока задержки
= (Предыдущий выход блока задержки) + (текущий выход квантователя)
Предполагая нулевое условие накопления,
u(nTs)=S displaystyle sum limitnj=1sig[ep(jTs)]]
Накопленная версия вывода DM = displaystyle sum limitnj=1v(jTs)
——— уравнение 5
Теперь обратите внимание, что
widehatx(nTs)=u([n−1]Ts)
= displaystyle sum limitn−1j=1v(jTs)
——— уравнение 6
Выход блока задержки — это отставание выхода Аккумулятора на одну выборку.
Из уравнений 5 и 6 мы получаем возможную структуру для демодулятора.
Аппроксимированная форма волны в лестничной клетке будет выходом дельта-модулятора с размером шага в виде дельты ( Δ ). Качество выходного сигнала умеренное.
Дельта Демодулятор
Дельта-демодулятор состоит из фильтра нижних частот, летнего датчика и цепи задержки. Схема предиктора здесь исключена, и, следовательно, предполагаемый вход не поступает на демодулятор.
Ниже приведена схема для дельта-демодулятора.
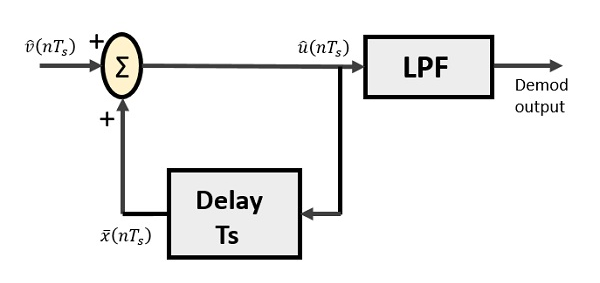
Из приведенной выше диаграммы мы имеем обозначения как —
-
widehatv(nTs) — входная выборка
-
widehatu(nTs) — летний результат
-
barx(nTs) — задержанный вывод
widehatv(nTs) — входная выборка
widehatu(nTs) — летний результат
barx(nTs) — задержанный вывод
Двоичная последовательность будет передана в качестве входа в демодулятор. Примерный выход лестничной клетки дан LPF.
Фильтр нижних частот используется по многим причинам, но основной причиной является устранение шума для внеполосных сигналов. Ошибка размера шага, которая может возникнуть в передатчике, называется зернистым шумом , который здесь исключается. Если шум отсутствует, то выход модулятора равен входу демодулятора.
Преимущества DM над DPCM
-
1-битный квантователь
-
Очень легкая конструкция модулятора и демодулятора
1-битный квантователь
Очень легкая конструкция модулятора и демодулятора
Однако в DM существует некоторый шум.
-
Искажение наклона при перегрузке (когда Δ мало)
-
Зернистый шум (когда Δ велико)
Искажение наклона при перегрузке (когда Δ мало)
Зернистый шум (когда Δ велико)
Адаптивная дельта-модуляция (ADM)
В цифровой модуляции мы столкнулись с определенной проблемой определения размера шага, который влияет на качество выходной волны.
Больший размер шага необходим в крутом наклоне модулирующего сигнала, а меньший размер шага необходим там, где сообщение имеет небольшой наклон. Мельчайшие детали упускаются в процессе. Таким образом, было бы лучше, если бы мы могли регулировать размер шага в соответствии с нашим требованием, чтобы получить выборку желаемым способом. Это концепция адаптивной дельта-модуляции .
Ниже приведена блок-схема адаптивного дельта-модулятора.
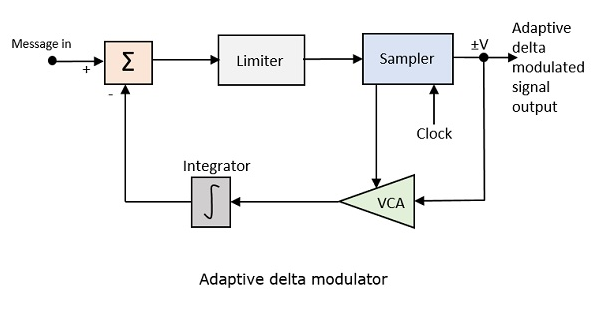
Усиление усилителя, управляемого напряжением, регулируется выходным сигналом сэмплера. Усиление усилителя определяет размер шага, и оба пропорциональны.
ADM квантует разницу между значением текущей выборки и прогнозируемой величиной следующей выборки. Он использует переменную высоту шага для прогнозирования следующих значений для точного воспроизведения быстро меняющихся значений.