Мы можем подключить любую тестовую цепь к осциллографу через зонд. Поскольку CRO является базовым осциллографом, зонд, который подключен к нему, также называется CRO-зондом .
Мы должны выбрать датчик таким образом, чтобы он не создавал проблем с нагрузкой в тестовой схеме. Так что мы можем правильно проанализировать тестовую схему с сигналами на экране CRO.
CRO-зонды должны иметь следующие характеристики .
- Высокий импеданс
- Высокая пропускная способность
Блок-схема датчика CRO показана на рисунке ниже.
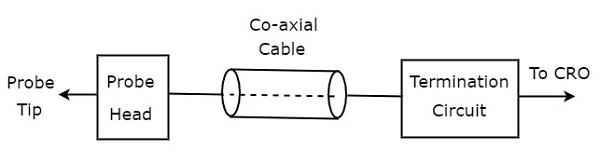
Как показано на рисунке, CRO-зонд в основном состоит из трех блоков. Это головка зонда, коаксиальный кабель и оконечная цепь. Коаксиальный кабель просто соединяет головку зонда и концевую цепь.
Типы CRO зондов
CRO-зонды можно классифицировать на следующие два типа .
- Пассивные зонды
- Активные зонды
Теперь давайте поговорим об этих двух типах зондов один за другим.
Пассивные зонды
Если головка зонда состоит из пассивных элементов, то это называется пассивным зондом . Принципиальная схема пассивного зонда показана на рисунке ниже.
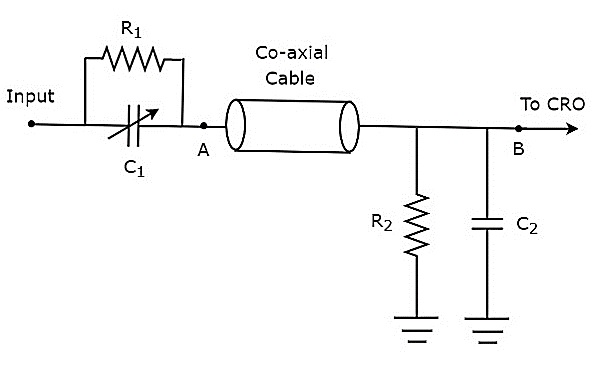
Как показано на рисунке, головка зонда состоит из параллельной комбинации резистора R1 и переменного конденсатора C1. Аналогично, оконечная цепь состоит из параллельной комбинации резистора R2 и конденсатора C2.
Вышеприведенная принципиальная схема видоизменена в виде мостовой схемы и показана на рисунке ниже.
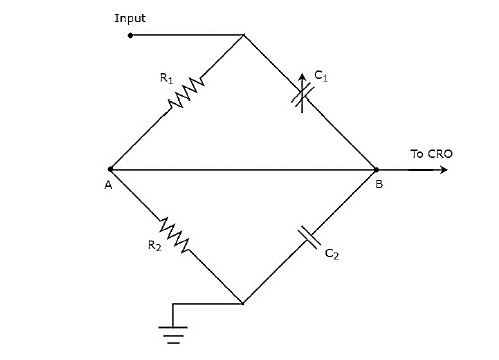
Мы можем сбалансировать мост, отрегулировав значение переменного конденсатора, c1. Мы обсудим концепцию мостов в следующих главах. В настоящее время рассмотрим следующее условие балансировки моста переменного тока .
Z1Z4=Z2Z3
Замените импедансы Z1,Z2,Z3 и Z4 как R1, frac1j omegaC1,R2 и frac1j omegaC2 соответственно в вышеприведенном уравнении.
R1 left( frac1j omegaC2 right)= left( frac1j omegaC1 right)R2
RightarrowR1C1=R2C2 Уравнение 1
По принципу деления напряжения мы получим напряжение на резисторе, R2 как
V0=Vi left( fracR2R1+R2 right)
Коэффициент ослабления — это отношение входного напряжения, Vi и выходного напряжения, V0. Итак, из вышеприведенного уравнения мы получим коэффициент затухания alpha как
alpha= fracViV0= fracR1+R2R2
Rightarrow alpha=1+ fracR1R2
Rightarrow alpha−1= fracR1R2
RightarrowR1= left( alpha−1 right)R2 Уравнение 2
Из уравнения 2 можно сделать вывод, что значение R1 больше или равно значению ?2 для целочисленных значений alpha>1.
Заменить уравнение 2 на уравнение 1.
left( alpha−1 right)R2C1=R2C2
Rightarrow left( alpha−1 right)C1=C2
RightarrowC1= fracC2 left( alpha−1 right) Уравнение 3
Из уравнения 3 можно сделать вывод, что значение C1 меньше или равно значению C2 для целочисленных значений alpha>1.
пример
Найдем значения R1 и C1 зонда с коэффициентом затухания, alpha равным 10. Предположим, R2=1M Omega и C2=18pF.
-
Шаг 1 — Мы получим значение R1, подставив в уравнение 2 значения alpha и R2.
Шаг 1 — Мы получим значение R1, подставив в уравнение 2 значения alpha и R2.
R1= left(10−1 right) times1 times106
RightarrowR1=9 times106
RightarrowR1=9M Omega
Шаг 2 — Мы получим значение C1, подставив в уравнение 3 значения alpha и C2.
C1= frac18 times10−12 left(10−1 right)
RightarrowC1=2 times10−12
RightarrowC1=2пФ
Следовательно, значения R1 и C1 зонда будут составлять 9M Omega и 2pF соответственно для данных спецификаций.
Активные зонды
Если головка зонда состоит из активных электронных компонентов, то она называется активным датчиком . Блок-схема активного зонда показана на рисунке ниже.
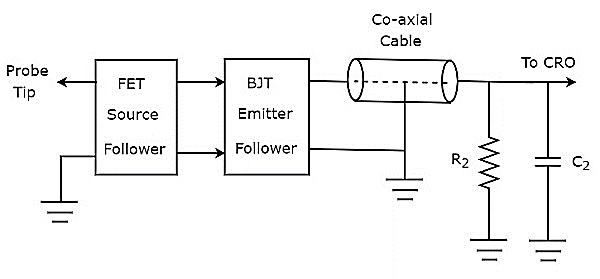
Как показано на рисунке, головка зонда состоит из повторителя источника FET в каскаде с повторителем BJT-эмиттера. Повторитель источника FET обеспечивает высокий входной импеданс и низкий выходной импеданс. Принимая во внимание, что целью BJT-повторителя является то, что он предотвращает или устраняет рассогласование импеданса.
Две другие части, такие как коаксиальный кабель и оконечная цепь, остаются одинаковыми как в активном, так и в пассивном датчиках.