Я написал несколько постов о разработке программного обеспечения, кодировании и темах, связанных с Java. На этот раз я решил поделиться с вами более интересным проектом, который я сделал. Я фанат Arduinos, Pis и других платформ для домашней автоматизации, а также просто увлекаюсь электроникой и механикой. Стремясь лучше понять, как работают сервоприводы, я принял решение создать собственную руку-робот. Эта серия постов будет подробно рассказывать о моем путешествии, а также о достижениях на этом пути.
Что вам нужно
Если вы думаете о том, чтобы делать такой проект, вам понадобится несколько вещей на этом этапе:
- Комплект MeArm (примерно 45 €)
- Arduino-совместимая плата (Raspberry Pi также поддерживается) (Arduino UNO Rev3 стоит примерно 20 €)
- Arduino IDE
- Мужские перемычки
- Крестовая отвертка
Эта установка обойдется вам примерно в 70 € в зависимости от выбранного вами магазина.
сборочный
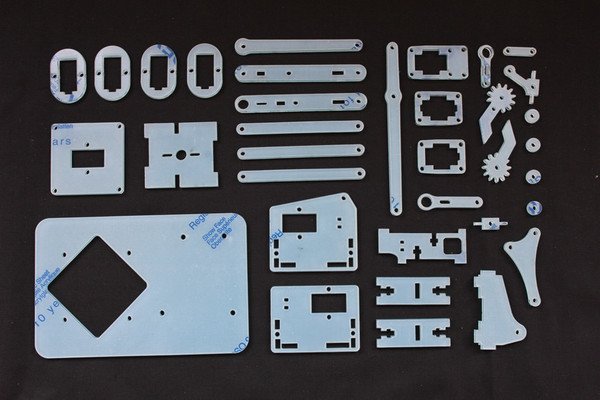
Когда все детали прибывают, вы можете начать процесс сборки. Есть несколько групп частей, которые вы будете использовать, и это хорошая идея, чтобы сгруппировать их соответствующим образом. Первая группа содержит все пластиковые детали, которые будут формировать корпус руки робота. Не забудьте снять защитную пластиковую крышку с деталей перед сборкой.
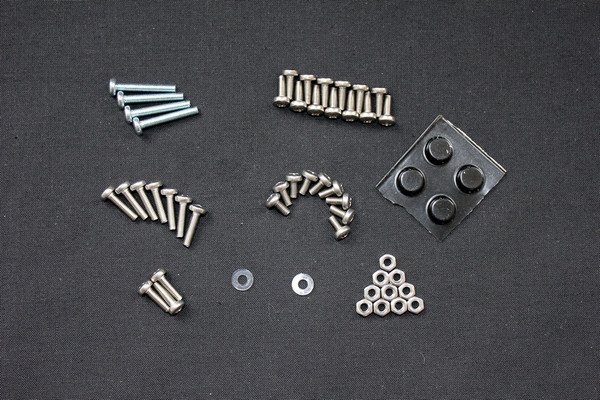
Вторая группа деталей — это винты и гайки для соединения пластиковых деталей. А также четыре липкие ножки, чтобы сделать платформу более устойчивой.
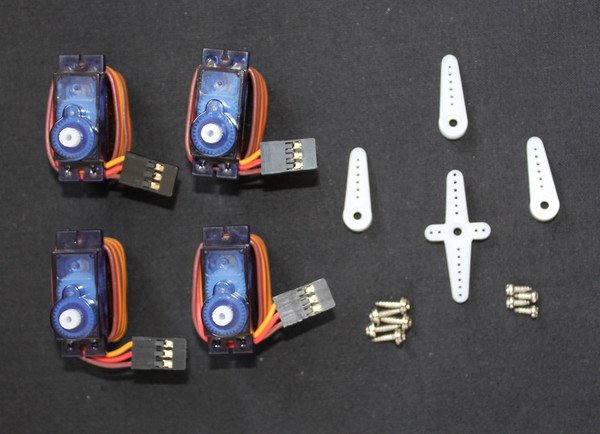
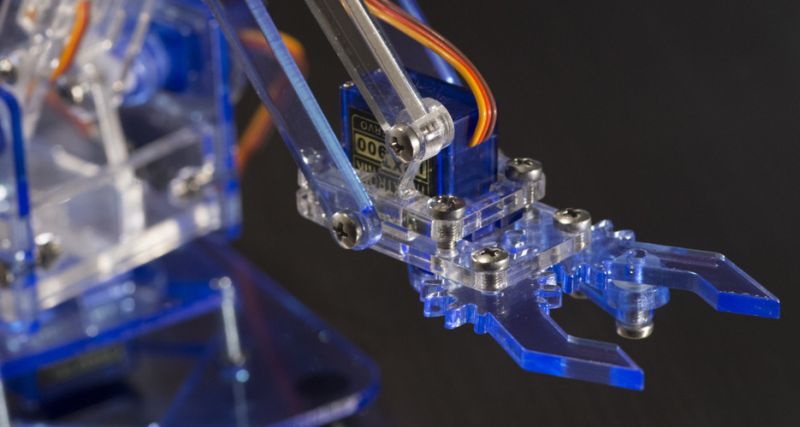
Последняя группа деталей состоит из сервоприводов и сопутствующих деталей, таких как винты и пластиковые рожки.
Весь процесс сборки описан в деталях в этом учебном пособии онлайн или в формате PDF .
Мало добра
Есть несколько вещей, которые я хочу отметить относительно сборки:
- Не торопись
- Эта сборка займет у вас пару часов, чтобы разобраться, так что не торопитесь и не торопитесь, чтобы не повредить свой комплект. Запасных частей почти нет, поэтому делайте выбор с умом.
- Не затягивайте винт слишком сильно
- Не используйте полностью затянутые винты, если не уверены в своей текущей сборке. Начните с легкого и, как только вы обретете уверенность, завершите деталь, затянув винты. Некоторые винты ослабнут после разборки.
- Части могут нуждаться в дополнительной работе
- Это может быть не так, но некоторые детали из моего комплекта нуждались в небольших модификациях, чтобы соответствовать друг другу. Просто легкое прикосновение углового шлифовального станка, чтобы удалить этот непослушный миллиметр с поверхности соприкасающихся частей одной из двух соприкасающихся частей, сделало свое дело.
- Обратите внимание на детали
- Сборка довольно сложная работа, поэтому вам нужно обратить внимание, чтобы вы правильно поняли ее с первого раза.
- Не ожидайте слишком многого (только пока)
- Как только вы закончите — круто. Ваша рука построена и готова двигаться. Однако на данный момент он абсолютно безжизненный, так как управлять им нечего.
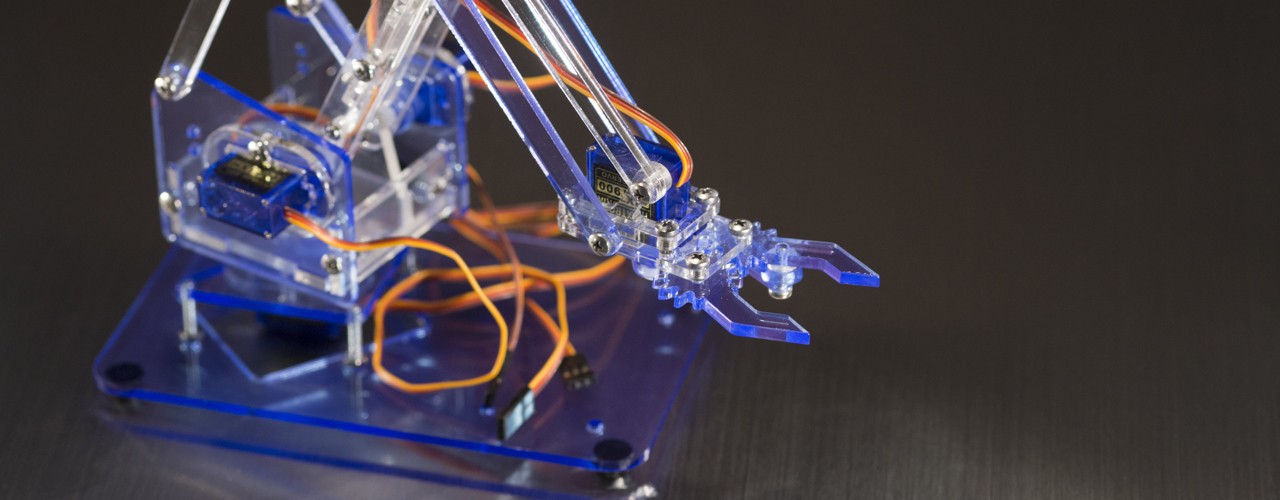
Конечный продукт
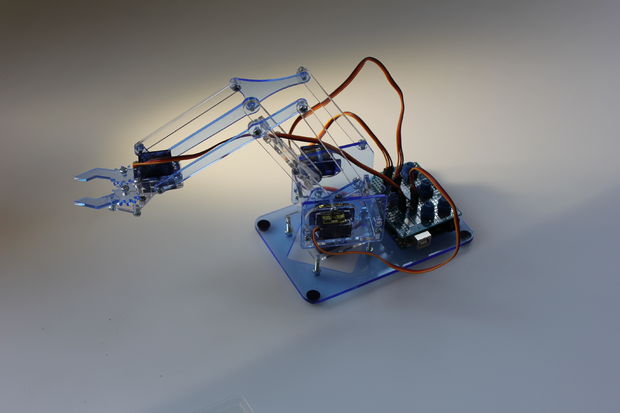
Если вы успешно завершите сборку, вы сможете увидеть устройство, похожее на это. Чтобы проверить физические свойства вашей сборки, убедитесь, что движение ваших сервоприводов выглядит естественным, просто перемещая их самостоятельно. Вы должны иметь возможность свободно перемещать их в пределах их естественных пределов, не нарушая никаких ограничений сервоприводов или физических ограничений конструкции.
Если вы нетерпеливы, как и я, вы почувствуете желание заставить его двигаться сразу после собрания. Так что возьмите свою Arduino-совместимую плату, пару проводов и выберите один из сервоприводов для игры.
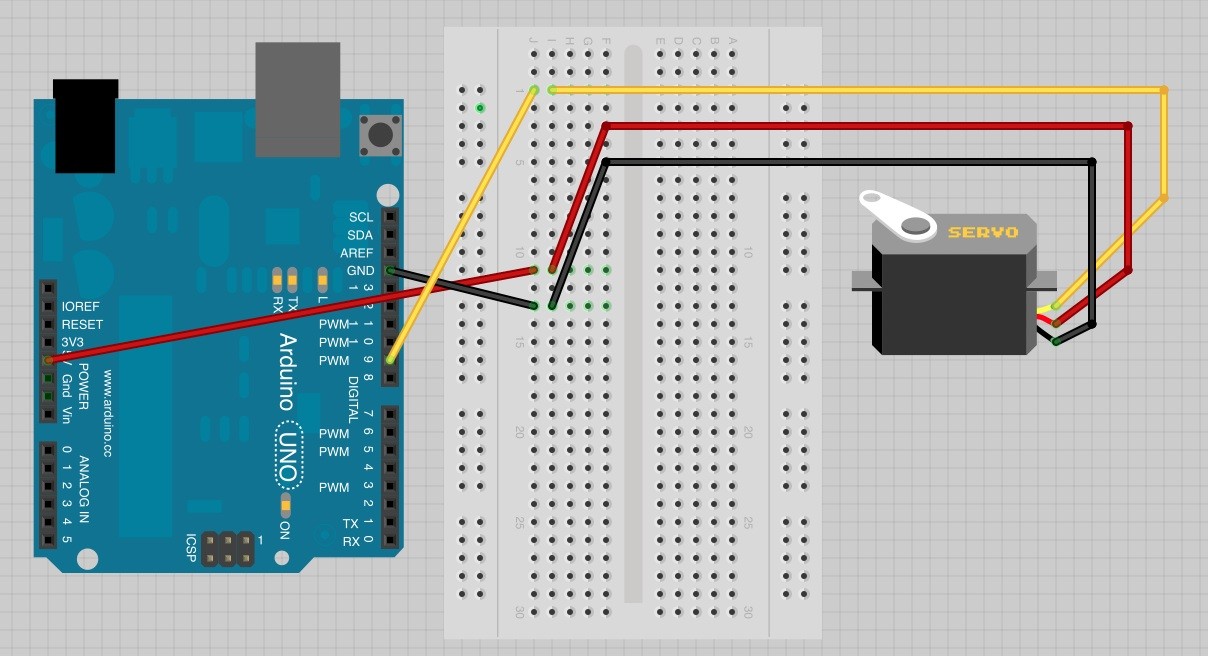
Если у вас нет опыта работы с сервоприводами (как у меня), я рад сообщить вам, что это не проблема. Есть очень хороший учебник по сервоприводам от Adafruit , который покажет вам все шаги, чтобы сделать сервопривод движением. Но в основном вам нужны две вещи — макет и эскиз. Следующая схема взята из вышеупомянутого учебника Adafruit и показывает простой способ подключить сервопривод к вашей плате Arduino.
Затем загрузите этот эскиз в свой Arduino и наблюдайте, как происходит волшебство. Не забудьте обновить номер булавки, который вы фактически использовали в скетче. Вот и все. Теперь вы должны увидеть движение серводвигателя, которое служит хорошим доказательством концепции.
Adafruits развертки набросок
|
01
02
03
04
05
06
07
08
09
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
|
/*Adafruit Arduino - Lesson 14. Sweep*/#include <Servo.h> int servoPin = 9; Servo servo; int angle = 0; // servo position in degrees void setup() { servo.attach(servoPin); } void loop() { // scan from 0 to 180 degrees for(angle = 0; angle < 180; angle++) { servo.write(angle); delay(15); } // now scan back from 180 to 0 degrees for(angle = 180; angle > 0; angle--) { servo.write(angle); delay(15); } } |
Что дальше?
Было очень весело собрать все части вместе и создать что-то своими руками. Отличный аспект такого проекта заключается в том, что вы будете думать о дизайне продукта и о том, как ваши решения влияют на возможности руки. Отличное упражнение на мышление для будущих дизайнеров. И это также возвращает вас в те времена, когда вы играли с Legos и такими игрушками. 🙂 В этот момент вы должны быть готовы сделать следующий шаг и попытаться управлять несколькими сервоприводами одновременно. Это будет тема моего следующего поста об этом проекте.
Фотографии, использованные в этом посте, были взяты со следующих сайтов: thepihut.com , 4tronix.co.uk и hackaday.com . Не стесняйтесь проверить их.
| Ссылка: | Соберите свой собственный роботизированный манипулятор от нашего партнера JCG Якуба Стаса в блоге |