Этот пост начинает небольшую (или более крупную?) Серию учебных пособий с использованием Arduino Motor / Stepper / Servo Shield с платой FRDM-KL25Z . Этот экран двигателя, вероятно, является одним из самых универсальных на рынке и имеет 2 разъема сервопривода и 4 разъема для двигателя постоянного или шагового двигателя. Это делает его отличным щитом для любого робототехнического проекта. 
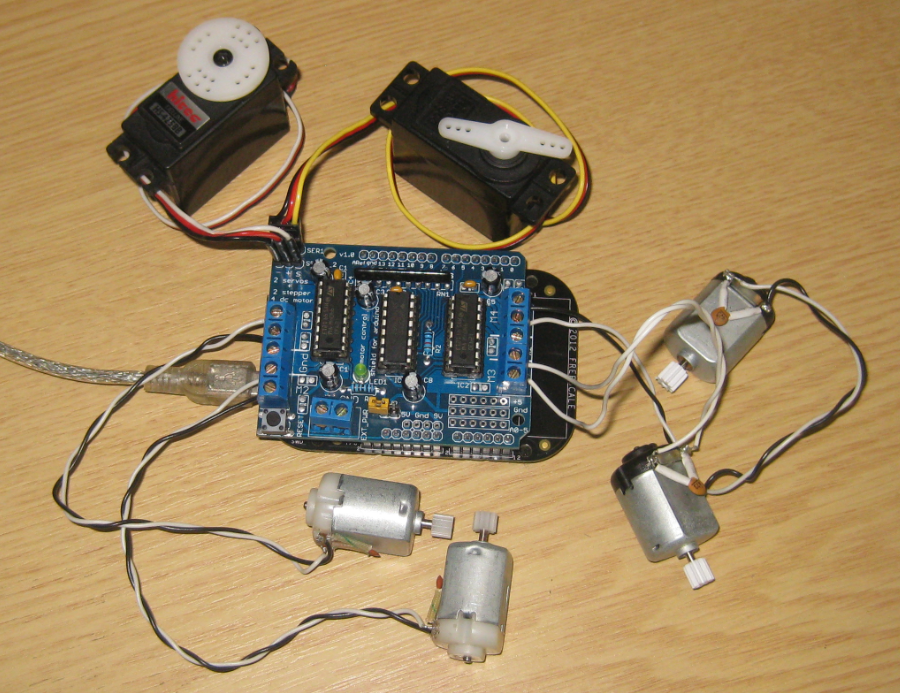
Шаговый сервомотор Arduino с FRDM-KL25Z
Серия начинается с урока о том, как управлять двумя серводвигателями. И если это не то, что вы ожидаете сделать с этим щитом, тогда вы можете проголосовать и сказать мне, что вы хотите увидеть вместо этого на этом моторном щите .
OEM или оригинал?
Оригинальный Arduino Motor / Stepper / Servo Shield можно приобрести в Adaftruit Industries по цене менее 20 долларов. Я использую OEM версию, смотрите эту ссылку . Функциональность та же, за исключением того, что OEM-версия работает только с двигателями до 16 В постоянного тока, в то время как оригинальный экран предназначен для двигателей до 25 В постоянного тока.
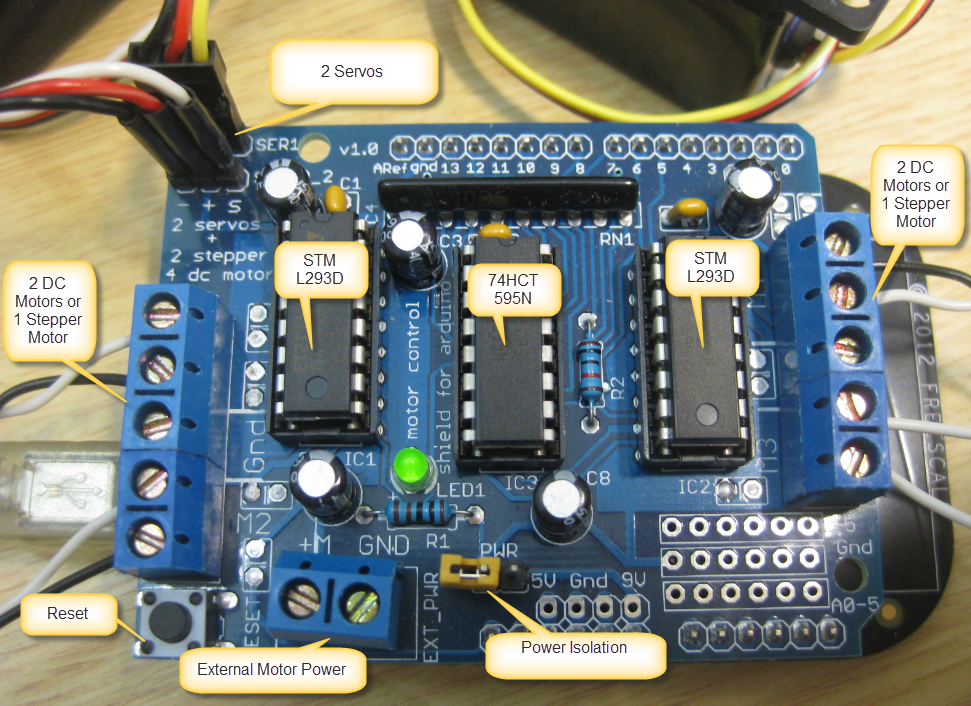
Детали сервопривода двигателя шагового двигателя
На плате установлены две микросхемы H-Bridge для двигателей STMicroelectronics L293D , которые могут приводить в действие до 4 двигателей постоянного тока (или до 2 шаговых двигателей) с током 0,6 А на мост (пик 1,2 А). 74HCT595N (на моей плате установлен SN74HC595 от Texas Instrument) — это сдвиговый регистр, используемый для H-мостов, чтобы уменьшить количество необходимых выводов (подробнее об этом в следующем посте). Клеммная колодка с перемычкой обеспечивает питание постоянного / шагового двигателя. 5 В постоянного тока для сервоприводов берется с платы FRDM.
FRDM-KL25Z может выдавать только несколько сотен мА на 5V Arduino. Это работает для небольших сервоприводов, но я рекомендую отключить питание 5 В для сервоприводов и использовать выделенные 5 В (или 6 В) для сервоприводов.
 FRDM-KL25Z может выдавать только несколько сотен мА на 5V Arduino. Это работает для небольших сервоприводов, но я рекомендую отключить питание 5 В для сервоприводов и использовать выделенные 5 В (или 6 В) для сервоприводов.
FRDM-KL25Z может выдавать только несколько сотен мА на 5V Arduino. Это работает для небольших сервоприводов, но я рекомендую отключить питание 5 В для сервоприводов и использовать выделенные 5 В (или 6 В) для сервоприводов.Контур
В этом руководстве я создаю проект с CodeWarrior для MCU10.4 для платы FRDM-KL25Z, а затем добавляю поддержку двух серводвигателей.
Компоненты Процессор Эксперт
В этом руководстве используются добавленные компоненты Processor Expert, которые не являются частью дистрибутива CodeWarrior. Используются следующие другие компоненты:
- Ожидание : позволяет ждать в течение заданного времени
- Серво : драйвер высокого уровня для двигателей хобби сервп
Убедитесь, что вы загрузили последние и самые лучшие компоненты из GitHub . Инструкции по загрузке и установке дополнительных компонентов можно найти здесь .
Создание проекта CodeWarrior
Чтобы создать новый проект в CodeWarrior:
- Файл> Создать> Проект Bareboard, дать имя проекту
- Укажите устройство, которое будет использоваться: MKL25Z128
- OpenSDA как соединение
- Поддержка ввода / вывода может быть установлена на «Нет ввода / вывода»
- Processor Expert как опция быстрой разработки приложений
Это создает отправную точку для моего проекта:
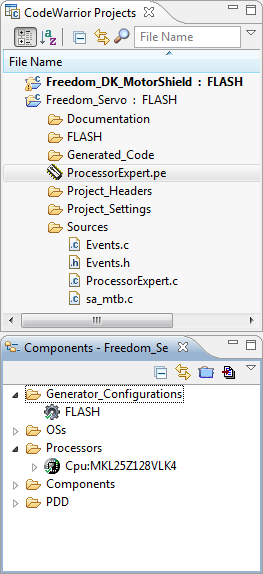
Создан новый серво-проект
Серводвигатель
Серводвигатели используются в RC (радиоуправлении) или (хобби) робототехнике.
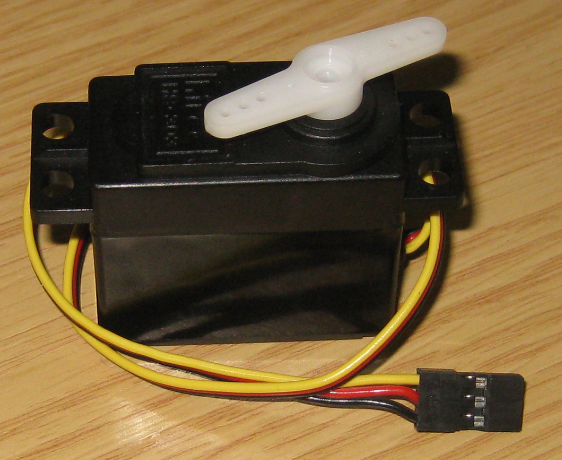
Типичный серводвигатель (Hitec HS-303)
Мотор имеет 3 разъема:
- GND (черный)
- Мощность (красная), обычно 5 В, но может быть 6 В или даже выше
- ШИМ (белый или желтый), сигнал для информации о положении
Сигнал ШИМ обычно имеет частоту 50 Гц (20 мс), с длительностью (высокая длительность) от 1 мс до 2 мс.
На снимке экрана ниже показан такой сигнал 50 Гц с рабочим циклом 1,5 мс (среднее положение сервопривода):
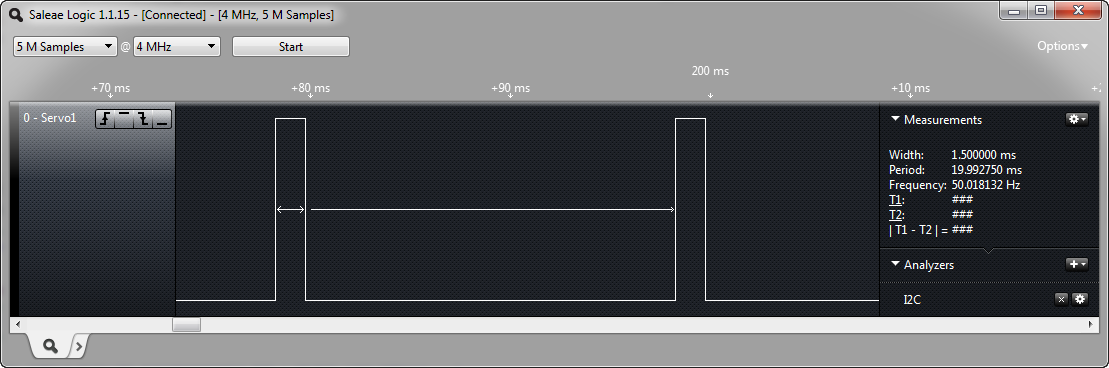
Сервосигнал
 Многие сервоприводы работают менее 1 мс и более 2 мс. Например, у многих сервоприводов Hitec диапазон составляет 0,9… 2,1 мс. Проверьте лист данных ваших сервоприводов для деталей. Если у вас нет таблицы данных, вы можете просто поэкспериментировать с другими значениями.
Многие сервоприводы работают менее 1 мс и более 2 мс. Например, у многих сервоприводов Hitec диапазон составляет 0,9… 2,1 мс. Проверьте лист данных ваших сервоприводов для деталей. Если у вас нет таблицы данных, вы можете просто поэкспериментировать с другими значениями.С режимом ШИМ от 1 мс до 2 мс в течение периода 20 мс это означает, что используется только 10% от всего режима ШИМ. Это означает, что если у вас разрешение ШИМ всего 8 бит, то можно использовать только 10% из 256 шагов. Таким образом, 8-битный сигнал ШИМ не дает мне точной настройки сервопривода.
Продолжительность рабочего цикла (1,2 мс) переводится в положение двигателя. Обычно сервопривод имеет встроенный регулятор с замкнутым контуром с микроконтроллером и потенциометром.
Компонент Эксперт Серво процессора
Здесь я использую свой собственный компонент ‘Servo’, который предлагает следующие возможности:
- Конфигурация ШИМ (режим работы и период)
- Мин. / Макс. И значения инициализации
- Методы изменения рабочего цикла
- Дополнительная поддержка оболочки командной строки: вы можете вводить команды и управлять сервоприводом. Это полезно для тестирования или калибровки.
- Дополнительное «синхронизированное» перемещение, так что вы можете перемещать сервопривод быстрее или медленнее в новую позицию, управляемую прерыванием
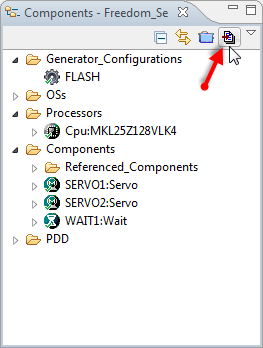
В представлении «Компоненты» я добавляю компонент «Серво». Чтобы добавить его в свой проект, я могу дважды щелкнуть по нему или использовать значок «+» в этом представлении:
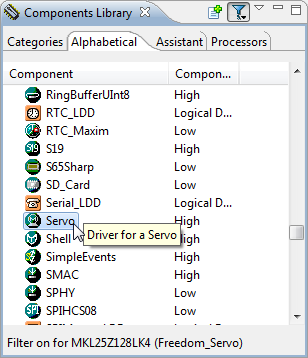
Сервокомпонент в представлении библиотеки компонентов
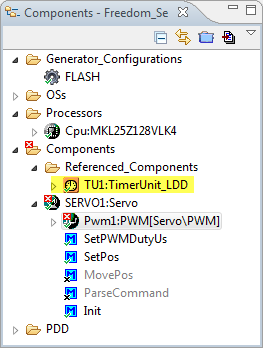
Это добавит новый компонент ‘Servo’ в проект:
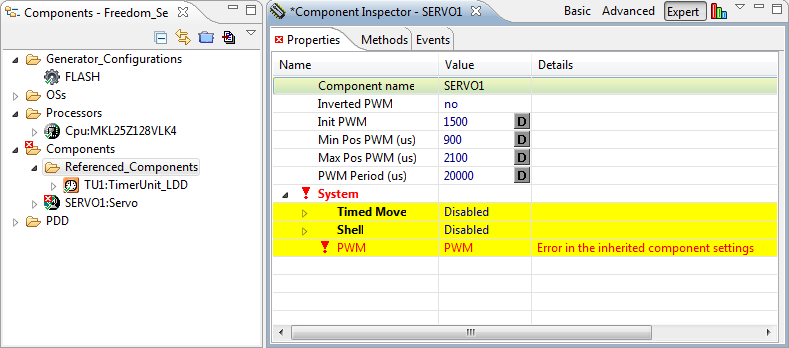
Серво компонент добавлен
Но он показывает ошибки, так как сначала необходимо настроить параметры ШИМ и выводов.
Конфигурация ШИМ
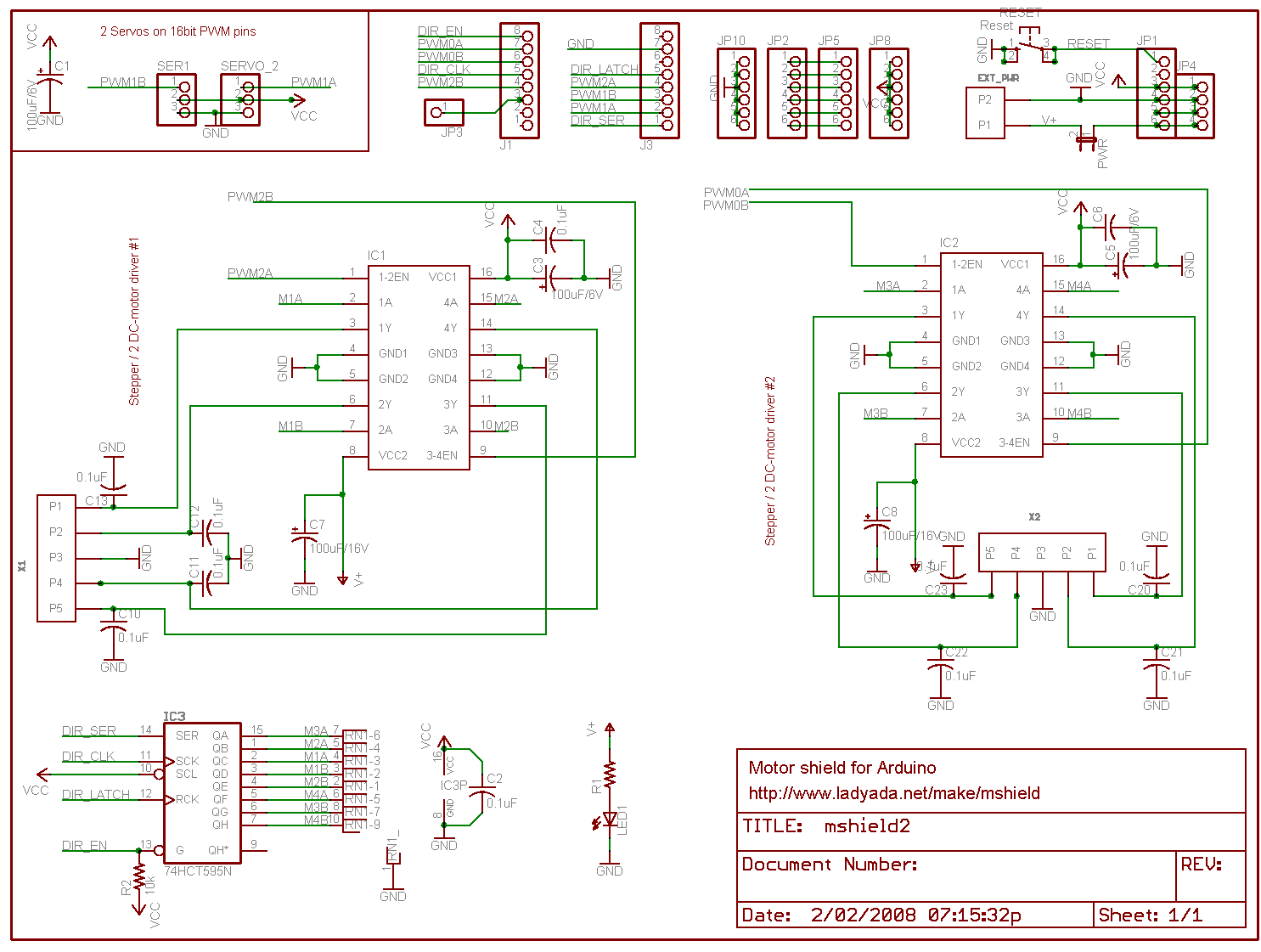
На Arduino Мотор / шаговых / серво щит два заголовка серводвигатель соединены PWM1B и PWM1A (см схематичное ):
{kind=link}
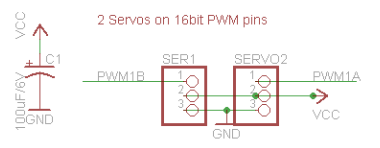
Сервопривод на борту (источник: схема щита электроники DK)
После сигналов это заканчивается на следующих выводах на KL25Z:
- Servo 1 => PWM1B => Arduino Header D10 => FRDM-KL25Z D10 => KL25Z pin 73 => PTD0 / SPI0_PCS0 / TPM0_CH0
- Servo 2 => PWM1A => Arduino Header D9 => FRDM-KL25Z D9 => KL25Z pin 78 => ADC0_SE6b / PTD5 / SPI1_SCK / UART2_TX / TPM0_CH5
Из имен выводов на Kinets (TPM0_CH0 и TPM0_CH5) я вижу, что это будет тот же таймер (TPM0), но с разными номерами каналов (CH0 и CH5).
Для моего первого эксперта по сервопроцессору я создал «TimerUnit_LDD», которым я смогу поделиться (позже об этом). В TimerUnit_LDD реализует ‘ L ogical D evice D река’ для моего PWM:
TimerUnit_LDD
Поэтому я выбираю компонент ШИМ внутри компонента серво и настраиваю его для TPM0_C0V и вывода PTD0 / SPI0_PCS0 / TPM0_CH0 с низкой начальной полярностью. Период 20 мс (50 Гц) и начальный импульс с 1,5 мс (средняя точка) уже должны быть предварительно настроены:
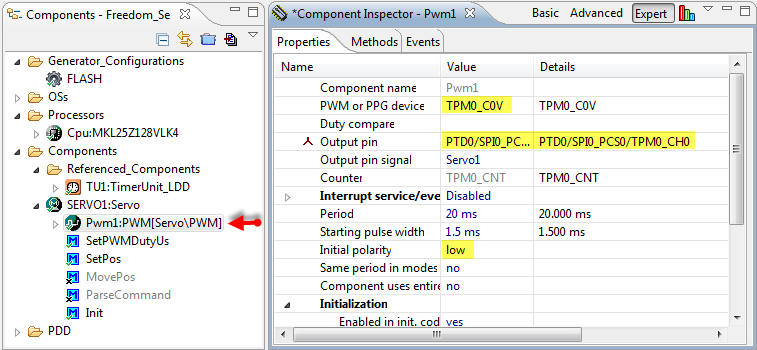
Конфигурация Servo1 PWM
Из-за инвертированной логики ШИМ мне нужно установить атрибут «Инвертированный ШИМ» в компоненте Servo:
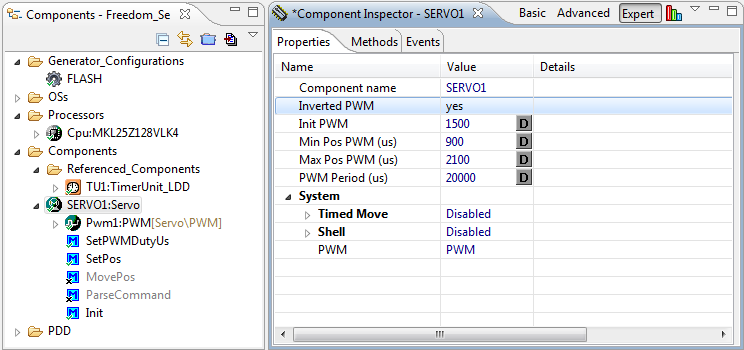
Инвертированный ШИМ
Другие настройки компонента Servo мы можем оставить «как есть» на данный момент. «Min Pos PWM» и «Max Pos PWM» определяют диапазон рабочего цикла ШИМ, который мы будем использовать позже для положения сервопривода.
Добавление второго сервопривода
Как и в случае с первым сервоприводом, я добавляю второй сервопривод из представления библиотеки компонентов. Поскольку в моей системе уже есть TimerUnit_LDD, Processor Expert спрашивает меня, хочу ли я повторно использовать существующий или создать новый компонент:
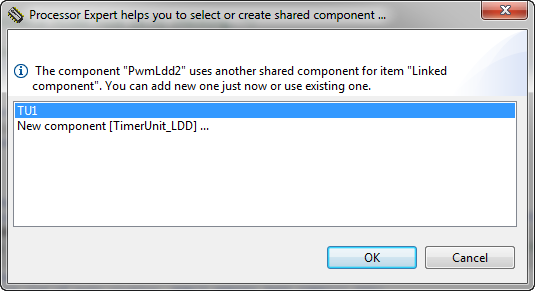
Диалог общего компонента
Как объяснено выше: я могу использовать один и тот же таймер (только другой вывод / канал), поэтому я выбрал существующий компонент и нажал OK.
Как и выше, я настраиваю канал таймера и вывод с начальной полярностью:
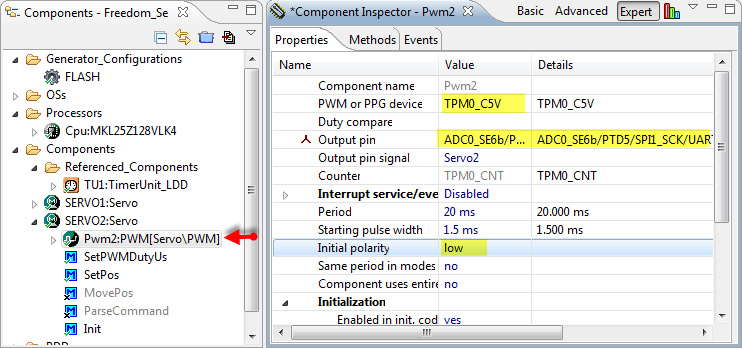
Конфигурация Servo2 PWM
И я не должен забывать включить инвертированную логику:
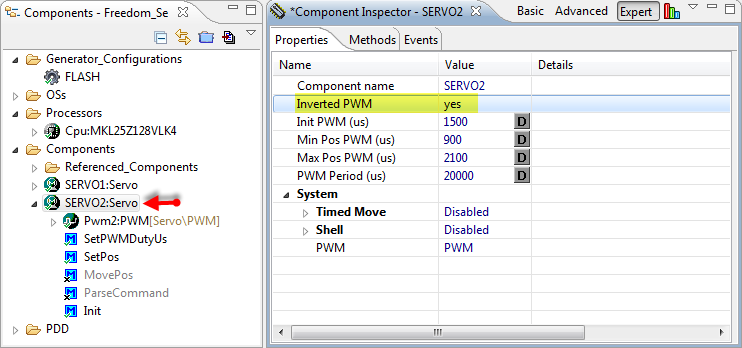
Инвертированный ШИМ для Servo2
Тестовое приложение
Время попробовать. Для этого я создаю простое демонстрационное приложение, которое меняет положение обоих сервоприводов. Сначала я добавляю компонент Wait в проект из библиотеки компонентов:
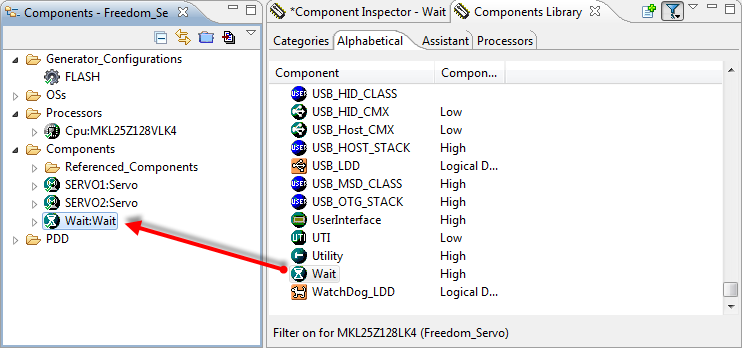
Добавлен компонент ожидания
Поскольку у меня настроены все компоненты Processor Expert, я могу сгенерировать код:
Генерация кода эксперта процессора
Затем я добавляю новый заголовочный Application.h файл в свой проект. Для этого я выбираю папку «Источники» моего проекта и использую контекстное меню « Создать»> «Файл заголовка», чтобы добавить мой новый файл заголовка:
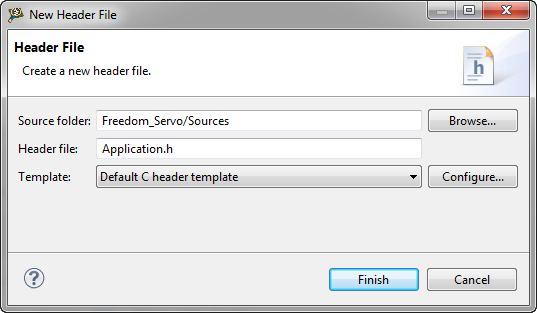
Новое приложение.h
В этом заголовочном файле Application.h я добавляю прототип для подпрограммы запуска приложения:
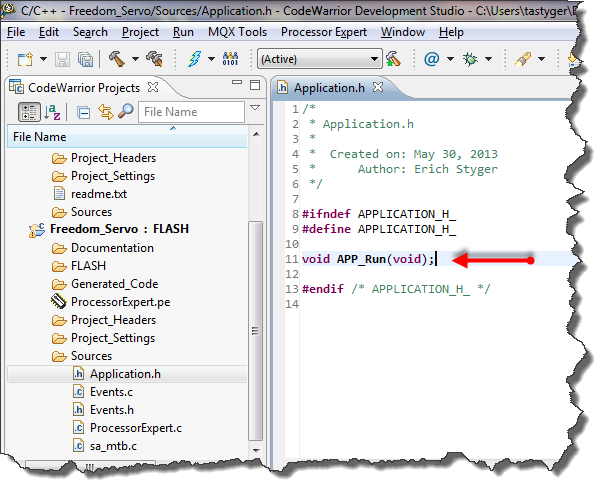
Добавлен прототип APP_Run
Из main() ин ProcessorExpert.c, я называю эту функцию (не забудьте включить заголовочный файл):
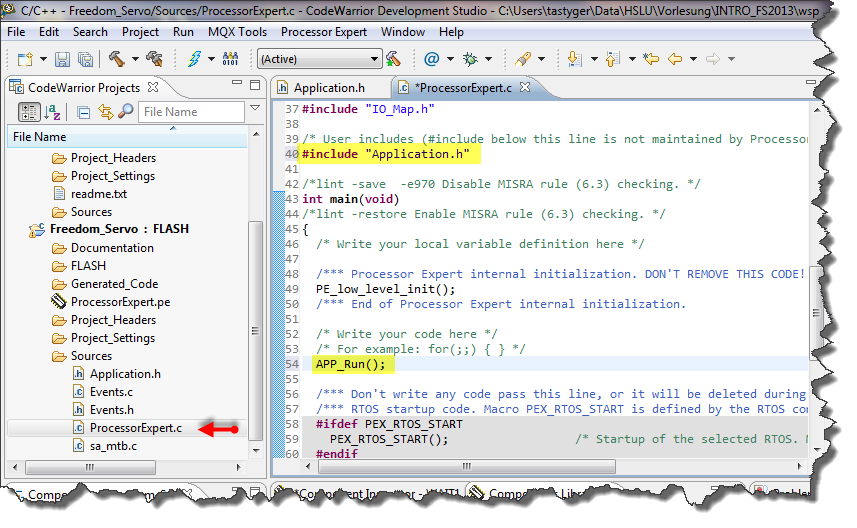
Вызов APP_Run с основного
Таким же образом я добавляю новый исходный файл Application.c:
Новое приложение.c
Чтобы проверить мои сервоприводы, я использую метод SetPos (), который принимает 8-битное (от 0 до 255) значение, которое является позицией. Чтобы немного затормозить, я жду несколько миллисекунд между разными позициями:
#include "Application.h"
#include "WAIT1.h"
#include "SERVO1.h"
#include "SERVO2.h"
void APP_Run(void) {
uint16_t pos;
for(;;) {
for(pos=0;pos<=255;pos++) {
SERVO1_SetPos(pos);
SERVO2_SetPos(pos);
WAIT1_Waitms(50);
}
}
}
Сохраните все файлы, и мы должны быть готовы попробовать это на доске.
Сборка, загрузка и запуск
Это оно! Время построить проект (меню Project> Build Project ) и загрузить его с помощью отладчика (меню Run> Debug ) и запустить приложение. Если все идет правильно, то два сервопривода будут медленно поворачиваться в одном направлении до конечного положения, а затем возвращаться в исходное положение.
Резюме
На мой взгляд, очень просто использовать серводвигатели для хобби с FRDM-KL25Z, CodeWarrior, Processor Expert и дополнительными компонентами, а также Arduino / Stepper / Servo Shield. Я надеюсь, что этот пост будет полезен для начала ваших собственных экспериментов с любительскими серводвигателями, чтобы вывести любой роботизированный проект на новый уровень.
У меня есть здесь, на GitHub, проект, который показывает то, что объясняется в этом посте, но с гораздо большим количеством компонентов, наворотов и свистков