После обсуждения основ импульсных цепей, давайте теперь рассмотрим различные схемы, которые генерируют и имеют дело с волнами зубьев пилы . Волна зубьев пилы увеличивается со временем линейно и имеет внезапное уменьшение. Это также называется сигналом временной базы . На самом деле, это идеальный выход генератора временной базы.
Что такое генератор временной базы?
Электронный генератор, который генерирует высокочастотные пилообразные волны, можно назвать Генератором временной базы . Его также можно понимать как электронную схему, которая генерирует выходное напряжение или форму волны тока, часть которой изменяется линейно со временем . Горизонтальная скорость генератора временной базы должна быть постоянной.
Чтобы отобразить изменения сигнала относительно времени на осциллографе, напряжение, которое изменяется линейно во времени, должно быть приложено к отклоняющим пластинам. Это дает сигнал развернуть луч горизонтально по экрану. Следовательно, напряжение называется Sweep Voltage . Генераторы временной базы называются цепями развертки .
Особенности сигнала временной базы
Чтобы сформировать временную форму волны в CRO или кинескопе, отклоняющее напряжение линейно возрастает со временем. Обычно используется генератор временной базы, в котором луч линейно отклоняется по экрану и возвращается в свою начальную точку. Это происходит в процессе сканирования . Катодно-лучевая трубка, а также кинескоп работают по тому же принципу. Луч отклоняется по экрану с одной стороны на другую (обычно слева направо) и возвращается в ту же точку.
Это явление называется следом и отступлением . Отклонение луча по экрану слева направо называется трассировкой , в то время как возврат луча справа налево называется возвратом или вылетом назад . Обычно этот откат не виден. Этот процесс выполняется с помощью генератора пилообразных волн, который устанавливает период времени отклонения с помощью используемых компонентов RC.
Попробуем разобраться в части зубчатой волны.
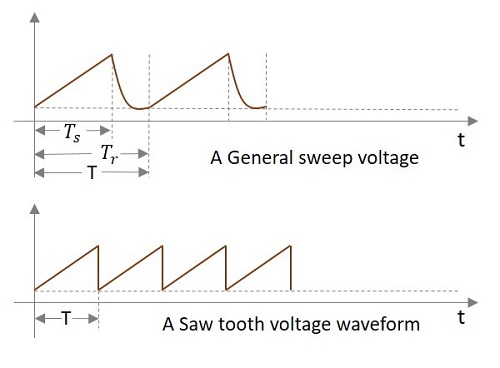
В приведенном выше сигнале время, в течение которого выходной сигнал линейно увеличивается, называется временем развертки (T S ), а время, необходимое для возврата сигнала к его начальному значению, называется временем восстановления, временем возврата или временем восстановления ( T). г ) Оба этих периода времени вместе образуют период времени одного цикла базового сигнала времени.
Фактически, эта осциллограмма напряжения развертки, которую мы получаем, является практическим выходом схемы развертки, тогда как идеальным выводом должна быть форма волны зубца пилы, показанная на рисунке выше.
Типы генераторов базы времени
Есть два типа Генераторов базы времени. Они —
-
Генераторы временной базы напряжения — Генератор временной базы, который обеспечивает форму волны выходного напряжения, которая изменяется линейно со временем, называется Генератором временной базы напряжения.
-
Генератор текущей временной базы — Генератор временной базы, который обеспечивает выходной сигнал тока, который изменяется линейно со временем, называется Генератором текущей временной базы.
Генераторы временной базы напряжения — Генератор временной базы, который обеспечивает форму волны выходного напряжения, которая изменяется линейно со временем, называется Генератором временной базы напряжения.
Генератор текущей временной базы — Генератор временной базы, который обеспечивает выходной сигнал тока, который изменяется линейно со временем, называется Генератором текущей временной базы.
Приложения
Генераторы временной базы используются в CRO, телевизорах, дисплеях RADAR, системах точного измерения времени и временной модуляции.
Ошибки развертки сигналов
После генерации сигналов развертки пришло время передать их. Переданный сигнал может подвергаться отклонению от линейности. Чтобы понять и исправить возникшие ошибки, мы должны знать некоторые распространенные ошибки.
Отклонение от линейности выражается тремя различными способами. Они —
- Ошибка наклона или скорости развертки
- Ошибка смещения
- Ошибка передачи
Давайте обсудим это подробно.
Ошибка наклона или скорости разворота ( с )
Напряжение развертки должно увеличиваться линейно со временем. Скорость изменения напряжения развертки во времени должна быть постоянной. Это отклонение от линейности определяется как Ошибка скорости наклона или Ошибка скорости развертки .
Скорость наклона или развертки eror e s = fracразницавнаклонвначалоиконецизразверткиначальныйзначениеиз :наклон
= frac left( frac mathrmdV0 mathrmdt right)t=0− left( frac mathrmdV0 mathrmdt right)t=Ts left( frac mathrmdV0 mathrmdt right)t=0
Ошибка смещения (e d )
Важным критерием линейности является максимальная разница между фактическим напряжением развертки и линейной разверткой, которая проходит через начальную и конечную точки фактической развертки.
Это можно понять из следующего рисунка.
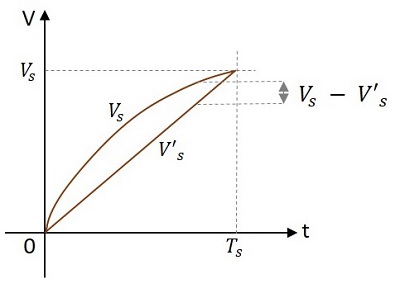
Ошибка смещения e d определяется как
e d = frac(фактическаяскорость) thicksim(линейнаяразверткачтопроходитначалоиокончаниеofактуальнаяразвертка)амплитудаofsweepattheendofsweeptime
= frac(Vs−V′s)maxVs
Где V s — фактическая развертка, а V — линейная развертка.
Ошибка передачи (e t )
Когда сигнал развертки проходит через цепь верхних частот, выход отклоняется от входа, как показано ниже.
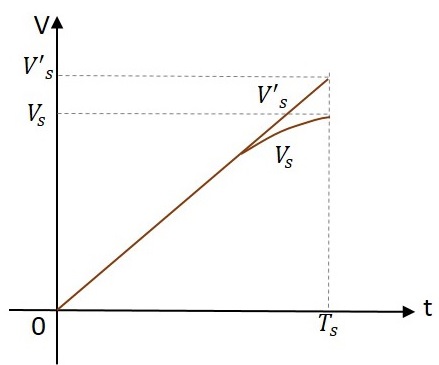
Это отклонение выражается как ошибка передачи.
Ошибка передачи = \ frac {(входная информация) \: \ thicksim \ 🙁 выходная информация}} {входная информация \: at \: \: end \: of \: the \: sweep}
et= fracV′s−VV′s
Где V ‘ s является входом, а V s является выходом в конце развертки, т.е. при t = T s .
Если отклонение от линейности очень мало и напряжение развертки может быть аппроксимировано суммой линейных и квадратичных слагаемых в t, то три вышеуказанные ошибки связаны как
ed= fraces8= fracet4
es=2et=8ed
Ошибка скорости развертки является более доминирующей, чем ошибка смещения.